https://github.com/andrewannex/vggt
[CVPR 2025] VGGT: Visual Geometry Grounded Transformer
Science Score: 10.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
○CITATION.cff file
-
○codemeta.json file
-
○.zenodo.json file
-
○DOI references
-
✓Academic publication links
Links to: arxiv.org -
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (12.2%) to scientific vocabulary
Last synced: 9 months ago
·
JSON representation
Repository
[CVPR 2025] VGGT: Visual Geometry Grounded Transformer
Basic Info
Statistics
- Stars: 0
- Watchers: 0
- Forks: 0
- Open Issues: 0
- Releases: 0
Fork of facebookresearch/vggt
Created about 1 year ago
· Last pushed about 1 year ago
https://github.com/AndrewAnnex/vggt/blob/main/
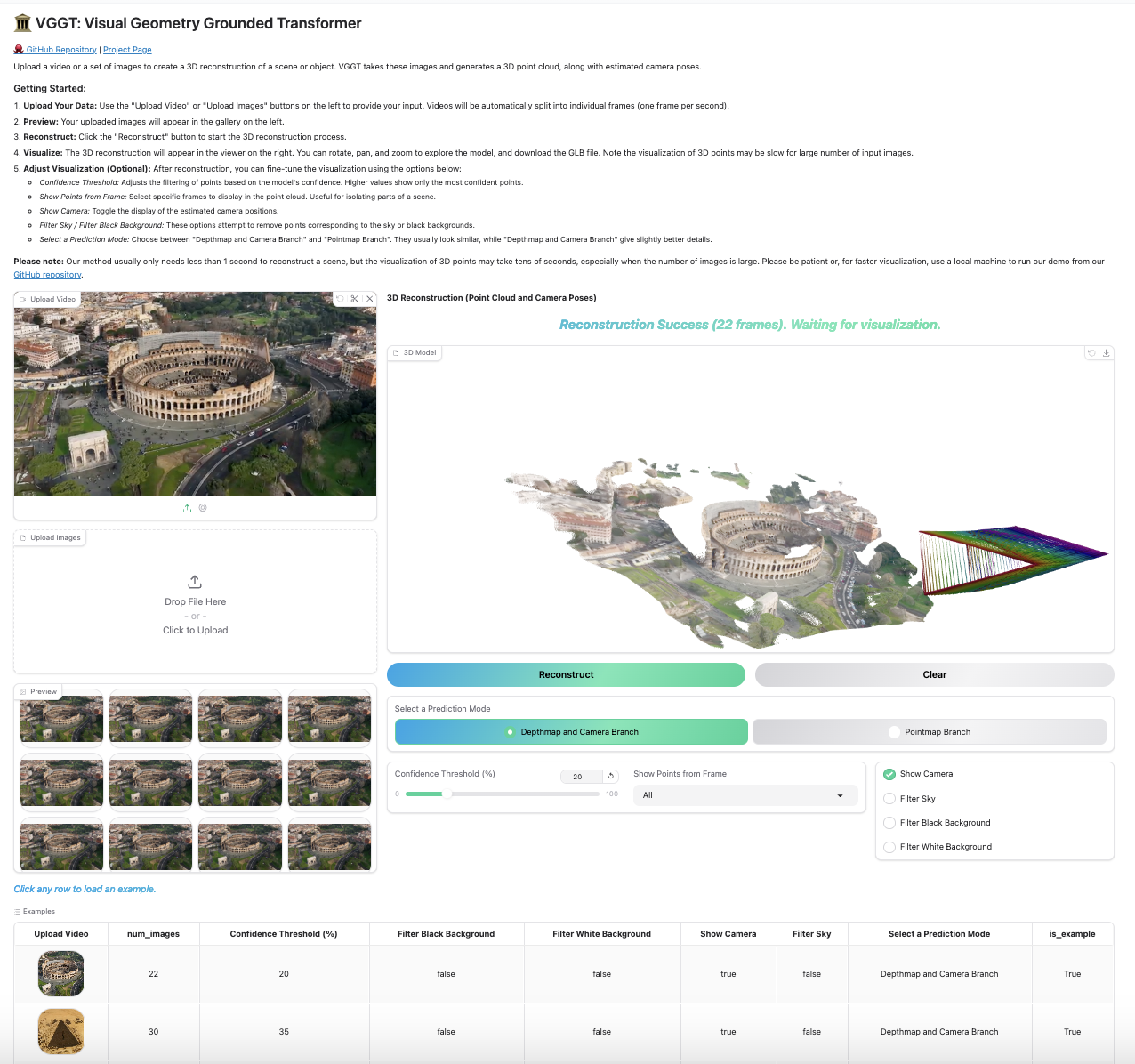
```bibtex @inproceedings{wang2025vggt, title={VGGT: Visual Geometry Grounded Transformer}, author={Wang, Jianyuan and Chen, Minghao and Karaev, Nikita and Vedaldi, Andrea and Rupprecht, Christian and Novotny, David}, booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, year={2025} } ``` ## Overview Visual Geometry Grounded Transformer (VGGT, CVPR 2025) is a feed-forward neural network that directly infers all key 3D attributes of a scene, including extrinsic and intrinsic camera parameters, point maps, depth maps, and 3D point tracks, **from one, a few, or hundreds of its views, within seconds**. ## Quick Start First, clone this repository to your local machine, and install the dependencies (torch, torchvision, numpy, Pillow, and huggingface_hub). ```bash git clone git@github.com:facebookresearch/vggt.git cd vggt pip install -r requirements.txt ``` Now, try the model with just a few lines of code: ```python import torch from vggt.models.vggt import VGGT from vggt.utils.load_fn import load_and_preprocess_images device = "cuda" if torch.cuda.is_available() else "cpu" # bfloat16 is supported on Ampere GPUs (Compute Capability 8.0+) dtype = torch.bfloat16 if torch.cuda.get_device_capability()[0] >= 8 else torch.float16 # Initialize the model and load the pretrained weights. # This will automatically download the model weights the first time it's run, which may take a while. model = VGGT.from_pretrained("facebook/VGGT-1B").to(device) # Load and preprocess example images (replace with your own image paths) image_names = ["path/to/imageA.png", "path/to/imageB.png", "path/to/imageC.png"] images = load_and_preprocess_images(image_names).to(device) with torch.no_grad(): with torch.cuda.amp.autocast(dtype=dtype): # Predict attributes including cameras, depth maps, and point maps. predictions = model(images) ``` The model weights will be automatically downloaded from Hugging Face. If you encounter issues such as slow loading, you can manually download them [here](https://huggingface.co/facebook/VGGT-1B/blob/main/model.pt) and load, or: ```python model = VGGT() _URL = "https://huggingface.co/facebook/VGGT-1B/resolve/main/model.pt" model.load_state_dict(torch.hub.load_state_dict_from_url(_URL)) ``` ## Detailed Usage You can also optionally choose which attributes (branches) to predict, as shown below. This achieves the same result as the example above. This example uses a batch size of 1 (processing a single scene), but it naturally works for multiple scenes. ```python from vggt.utils.pose_enc import pose_encoding_to_extri_intri from vggt.utils.geometry import unproject_depth_map_to_point_map with torch.no_grad(): with torch.cuda.amp.autocast(dtype=dtype): images = images[None] # add batch dimension aggregated_tokens_list, ps_idx = model.aggregator(images) # Predict Cameras pose_enc = model.camera_head(aggregated_tokens_list)[-1] # Extrinsic and intrinsic matrices, following OpenCV convention (camera from world) extrinsic, intrinsic = pose_encoding_to_extri_intri(pose_enc, images.shape[-2:]) # Predict Depth Maps depth_map, depth_conf = model.depth_head(aggregated_tokens_list, images, ps_idx) # Predict Point Maps point_map, point_conf = model.point_head(aggregated_tokens_list, images, ps_idx) # Construct 3D Points from Depth Maps and Cameras # which usually leads to more accurate 3D points than point map branch point_map_by_unprojection = unproject_depth_map_to_point_map(depth_map.squeeze(0), extrinsic.squeeze(0), intrinsic.squeeze(0)) # Predict Tracks # choose your own points to track, with shape (N, 2) for one scene query_points = torch.FloatTensor([[100.0, 200.0], [60.72, 259.94]]).to(device) track_list, vis_score, conf_score = model.track_head(aggregated_tokens_list, images, ps_idx, query_points=query_points[None]) ``` Furthermore, if certain pixels in the input frames are unwanted (e.g., sea, glass), you can mask them by setting the corresponding pixel values to 0 or 1, and then pass the masked images to the model. ## Visualization We provide multiple ways to visualize your 3D reconstructions and tracking results. Before using these visualization tools, install the required dependencies: ```bash pip install -r requirements_demo.txt ``` ### Interactive 3D Visualization **Please note:** VGGT typically reconstructs a scene in less than 1 second. However, visualizing 3D points may take tens of seconds due to third-party rendering, independent of VGGT's processing time. The visualization is slow especially when the number of images is large. #### Gradio Web Interface Our Gradio-based interface allows you to upload images/videos, run reconstruction, and interactively explore the 3D scene in your browser. You can launch this in your local machine or try it on [Hugging Face](https://huggingface.co/spaces/facebook/vggt). ```bash python demo_gradio.py ```VGGT: Visual Geometry Grounded Transformer



**[Visual Geometry Group, University of Oxford](https://www.robots.ox.ac.uk/~vgg/)**; **[Meta AI](https://ai.facebook.com/research/)** [Jianyuan Wang](https://jytime.github.io/), [Minghao Chen](https://silent-chen.github.io/), [Nikita Karaev](https://nikitakaraevv.github.io/), [Andrea Vedaldi](https://www.robots.ox.ac.uk/~vedaldi/), [Christian Rupprecht](https://chrirupp.github.io/), [David Novotny](https://d-novotny.github.io/)
#### Viser 3D Viewer Run the following command to run reconstruction and visualize the point clouds in viser. Note this script requires a path to a folder containing images. It assumes only image files under the folder. You can set `--use_point_map` to use the point cloud from the point map branch, instead of the depth-based point cloud. ```bash python demo_viser.py --image_folder path/to/your/images/folder ``` ### Track Visualization To visualize point tracks across multiple images: ```python from vggt.utils.visual_track import visualize_tracks_on_images track = track_list[-1] visualize_tracks_on_images(images, track, (conf_score>0.2) & (vis_score>0.2), out_dir="track_visuals") ``` This plots the tracks on the images and saves them to the specified output directory. ## Single-view Reconstruction Our model shows surprisingly good performance on single-view reconstruction, although it was never trained for this task. The model does not need to duplicate the single-view image to a pair, instead, it can directly infer the 3D structure from the tokens of the single view image. Feel free to try it with our demos above, which naturally works for single-view reconstruction. We did not quantitatively test monocular depth estimation performance ourselves, but [@kabouzeid](https://github.com/kabouzeid) generously provided a comparison of VGGT to recent methods [here](https://github.com/facebookresearch/vggt/issues/36). VGGT shows competitive or better results compared to state-of-the-art monocular approaches such as DepthAnything v2 or MoGe, despite never being explicitly trained for single-view tasks. ## Runtime and GPU Memory We benchmark the runtime and GPU memory usage of VGGT's aggregator on a single NVIDIA H100 GPU across various input sizes. | **Input Frames** | 1 | 2 | 4 | 8 | 10 | 20 | 50 | 100 | 200 | |:----------------:|:-:|:-:|:-:|:-:|:--:|:--:|:--:|:---:|:---:| | **Time (s)** | 0.04 | 0.05 | 0.07 | 0.11 | 0.14 | 0.31 | 1.04 | 3.12 | 8.75 | | **Memory (GB)** | 1.88 | 2.07 | 2.45 | 3.23 | 3.63 | 5.58 | 11.41 | 21.15 | 40.63 | Note that these results were obtained using Flash Attention 3, which is faster than the default Flash Attention 2 implementation while maintaining almost the same memory usage. Feel free to compile Flash Attention 3 from source to get better performance. ## Research Progression Our work builds upon a series of previous research projects. If you're interested in understanding how our research evolved, check out our previous works:Click to preview the Gradio interactive interface
| Deep SfM Revisited | ||
| PoseDiffusion | VGGSfM VGGT | |
| CoTracker |
Owner
- Name: Dr. Andrew Annex
- Login: AndrewAnnex
- Kind: user
- Location: Pasadena, CA
- Company: SETI Institute
- Website: http://andrewannex.com
- Twitter: AndrewAnnex
- Repositories: 179
- Profile: https://github.com/AndrewAnnex
Coder and Planetary Science PhD from Johns Hopkins University. Fmr Postdoc @ Caltech, Current Senior Science Systems Engineer @ SETI Institute