trackdlo
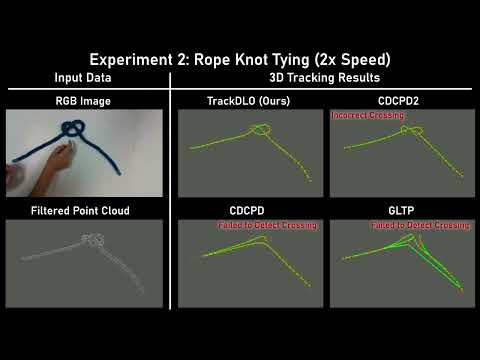
[RA-L 2023, ICRA 2024, ICRA RMDO 2024] This repository contains the code used in our paper, "TrackDLO: Tracking Deformable Linear Objects Under Occlusion with Motion Coherence." This algorithm is useful for tracking the motion of DLOs, including wire and rope, under several categories of occlusion without physics simulation.
Science Score: 49.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
○CITATION.cff file
-
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
✓DOI references
Found 1 DOI reference(s) in README -
✓Academic publication links
Links to: ieee.org -
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (13.3%) to scientific vocabulary
Keywords
Repository
[RA-L 2023, ICRA 2024, ICRA RMDO 2024] This repository contains the code used in our paper, "TrackDLO: Tracking Deformable Linear Objects Under Occlusion with Motion Coherence." This algorithm is useful for tracking the motion of DLOs, including wire and rope, under several categories of occlusion without physics simulation.
Basic Info
- Host: GitHub
- Owner: RMDLO
- Language: C++
- Default Branch: master
- Homepage: https://ieeexplore.ieee.org/document/10214157
- Size: 129 MB
Statistics
- Stars: 38
- Watchers: 4
- Forks: 11
- Open Issues: 0
- Releases: 0
Topics
Metadata Files
README.md


TrackDLO: Tracking Deformable Linear Objects Under Occlusion with Motion Coherence
IEEE Robotics and Automation Letters (IEEE Xplore: https://ieeexplore.ieee.org/document/10214157)
This repository contains the TrackDLO Robot Operating System (ROS) package. The TrackDLO ROS package is an implementation of our paper, TrackDLO: Tracking Deformable Linear Objects Under Occlusion with Motion Coherence, by Jingyi Xiang, Holly Dinkel, Harry Zhao, Naixiang Gao, Brian Coltin, Trey Smith, and Timothy Bretl. The TrackDLO algorithm is implemented in C++.


Get Started
The requirements and run instructions page provides information on package installation and usage.
Learn More
The supplementary video showcases experiments and failure cases.
The supplemental documentation contains details about the initialization process and parameter tuning.
Bibtex
bash
@ARTICLE{
xiang2023trackdlo,
author={Xiang, Jingyi and Dinkel, Holly and Zhao, Harry and Gao, Naixiang and Coltin, Brian and Smith, Trey and Bretl, Timothy},
journal={IEEE Robotics and Automation Letters},
title={TrackDLO: Tracking Deformable Linear Objects Under Occlusion With Motion Coherence},
year={2023},
volume={8},
number={10},
pages={6179-6186},
doi={10.1109/LRA.2023.3303710}
}
Owner
- Name: Representing and Manipulating Deformable Linear Objects
- Login: RMDLO
- Kind: organization
- Location: United States of America
- Repositories: 4
- Profile: https://github.com/RMDLO
The RMDLO project from UIUC studies robotic manipulation, grasp planning, segmentation, tracking, and 3D reconstruction of wires.
GitHub Events
Total
- Watch event: 13
- Member event: 1
- Push event: 5
- Pull request event: 1
- Fork event: 2
- Create event: 1
Last Year
- Watch event: 13
- Member event: 1
- Push event: 5
- Pull request event: 1
- Fork event: 2
- Create event: 1
Dependencies
- Pillow ==8.1.1
- numpy ==1.17.4
- opencv_python ==4.4.0.44
- rosnumpy ==0.0.5.2
- scikit-image ==0.21.0
- scipy ==1.5.2
- actions/checkout v3 composite