distance3d
Distance computation and collision detection in 3D.
Science Score: 67.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
✓DOI references
Found 3 DOI reference(s) in README -
✓Academic publication links
Links to: zenodo.org -
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (13.7%) to scientific vocabulary
Keywords
Repository
Distance computation and collision detection in 3D.
Basic Info
- Host: GitHub
- Owner: AlexanderFabisch
- License: other
- Language: Python
- Default Branch: master
- Homepage: https://alexanderfabisch.github.io/distance3d/
- Size: 121 MB
Statistics
- Stars: 69
- Watchers: 2
- Forks: 8
- Open Issues: 12
- Releases: 11
Topics
Metadata Files
README.md
![]()
![]()
![]()
distance3d
Distance computation and collision detection in 3D.
 |
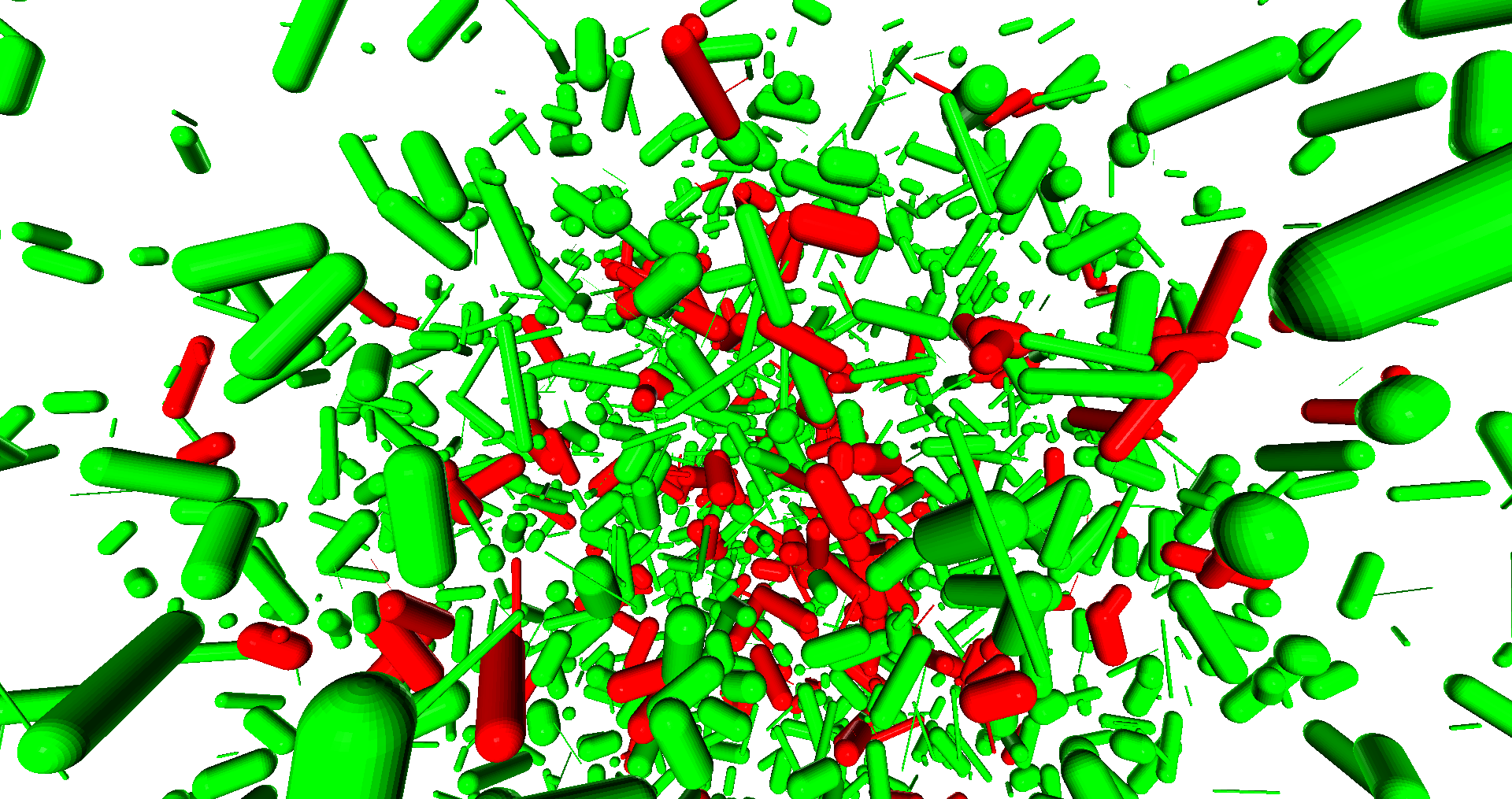 |
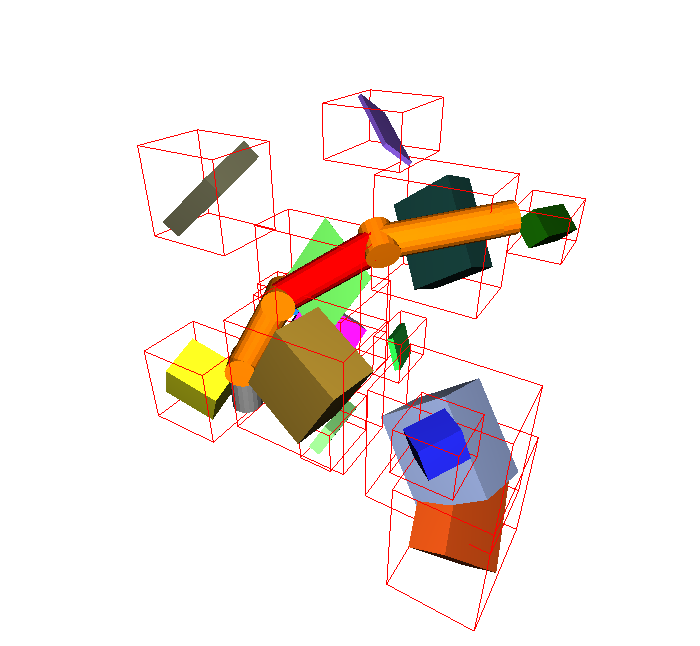
| Robot collision detection | Capsule collision detection |
 |
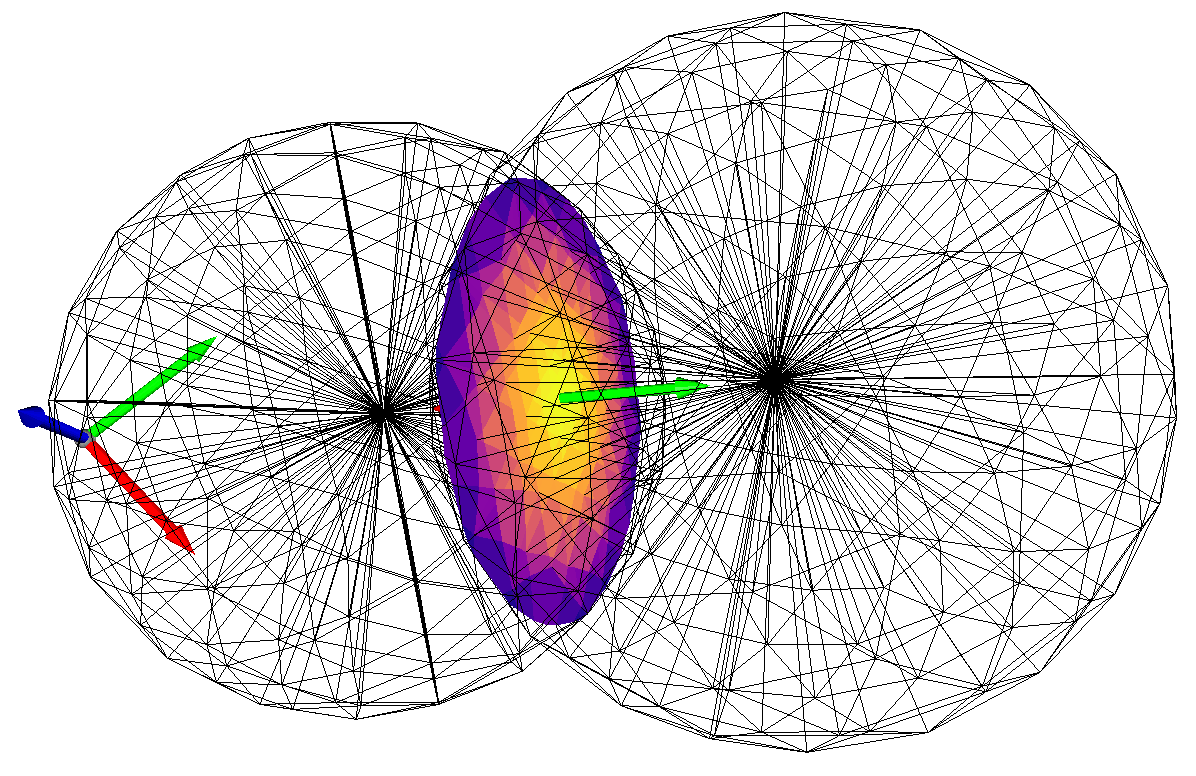 |
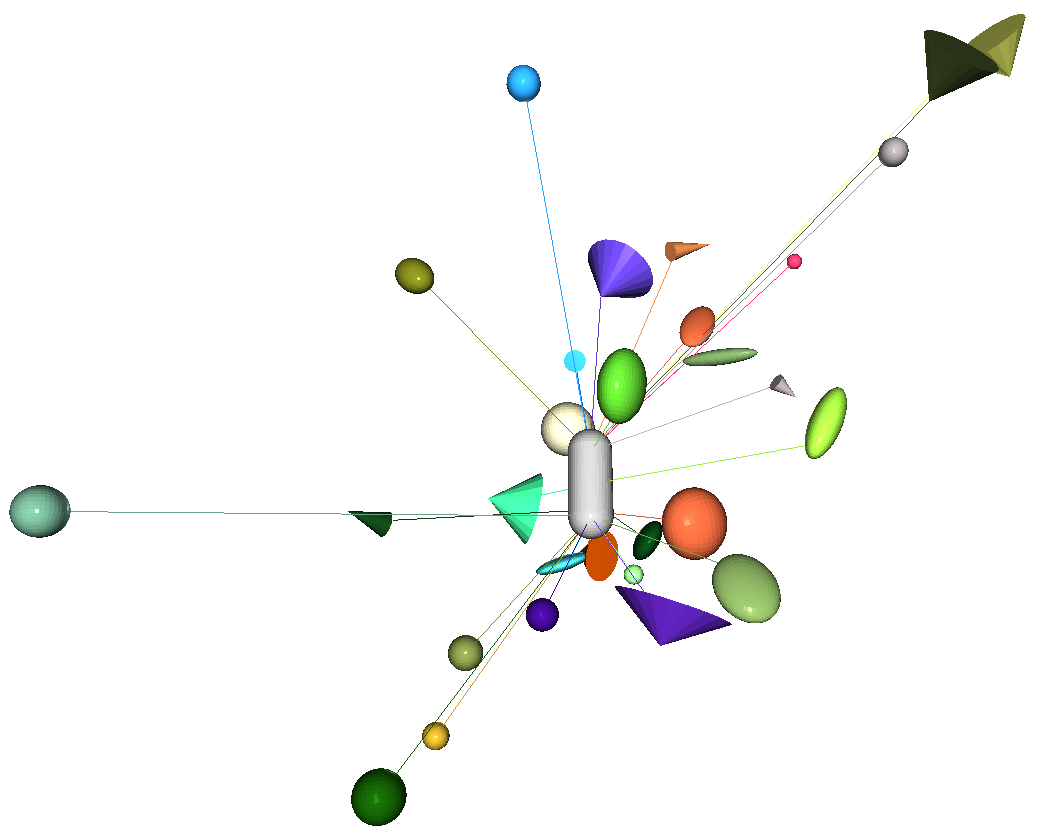
| Closest points | Hydroelastic contact |
Features
- Collision detection and distance computation with GJK.
- Calculation of penetration depth with EPA.
- Collision detection and calculation of penetration depth with MPR.
- Various specific distance calculations for points, lines, line segments, planes, triangles, rectangles, circles, disks, boxes, cylinders, ellipsoids, ...
- Broad phase collision detection with bounding volume hierarchy (AABB tree).
- Self-collision detection for robots.
- Contact wrench computation with hydroelastic contact model (pressure field model).
Dependencies
distance3d relies on numba to speed up computations. numba in its latest version requires at least Python 3.7 and NumPy 1.18. See here for current requirements. Required Python libraries will automatically be installed during installation of distance3d.
Installation
Install the package with
pip install -e .[all]
or from PyPI with
pip install distance3d[all]
Unit Tests
Install dependencies with
pip install -e .[test]
Run unit tests with
NUMBA_DISABLE_JIT=1 pytest
You will find the coverage report in htmlcov/index.html.
API Documentation
Install dependencies with
pip install -e .[doc]
Build API documentation with
cd doc
make html
You will find the documentation in doc/build/html/index.html.
Licenses
These implementations are mostly based on
- Christer Ericson: Real-Time Collision Detection, CRC Press, 2004.
- David H. Eberly: 3D Game Engine Design, CRC Press, 2006.
and accompanying implementations. These are marked as such.
The distance computation between a line and a circle is based on David Eberly's implementation, Copyright (c) 1998-2022 David Eberly, Geometric Tools, Redmond WA 98052, distributed under the Boost Software License, Version 1.0.
The original GJK algorithm is a translation to Python of the translation to C of the original Fortran implementation. The C implementation is from Diego Ruspini. It is available from http://realtimecollisiondetection.net/files/gilbert.c
Some features related to the GJK algorithm have been inspired by Bullet (zlib license) and are marked as such in the source code.
The EPA algorithm is adapted from Kevin Moran's GJK implementation (MIT License or Unlicense).
A GJK intersection test and the MPR algorithm are based on libccd (for details, see https://github.com/danfis/libccd). For the original code the copyright is of Daniel Fiser danfis@danfis.cz. It has been released under 3-clause BSD license.
The main GJK implementation is based on Jolt Physics, Copyright 2021 Jorrit Rouwe, MIT license.
The translation to Python has been done by Alexander Fabisch and the glue code around it is licensed under the 3-clause BSD license.
Owner
- Name: Alexander Fabisch
- Login: AlexanderFabisch
- Kind: user
- Location: Bremen
- Company: German Research Center for Artificial Intelligence (DFKI GmbH, @dfki), Robotics Innovation Center (@dfki-ric)
- Website: https://alexanderfabisch.github.io/
- Repositories: 62
- Profile: https://github.com/AlexanderFabisch
researcher, software developer, in robotics and machine learning
Citation (CITATION.cff)
cff-version: 1.2.0
message: "If you use this software, please cite it as below."
authors:
- family-names: Fabisch
given-names: Alexander
orcid: https://orcid.org/0000-0003-2824-7956
- family-names: Behn
given-names: Maarten
title: "distance3d: Distance computation and collision detection in 3D"
doi: 10.5281/zenodo.6509736
url: https://github.com/AlexanderFabisch/distance3d
type: software
GitHub Events
Total
- Issues event: 1
- Watch event: 14
- Push event: 1
- Fork event: 1
Last Year
- Issues event: 1
- Watch event: 14
- Push event: 1
- Fork event: 1
Issues and Pull Requests
Last synced: about 1 year ago
All Time
- Total issues: 35
- Total pull requests: 51
- Average time to close issues: about 2 months
- Average time to close pull requests: 12 days
- Total issue authors: 4
- Total pull request authors: 3
- Average comments per issue: 1.57
- Average comments per pull request: 1.08
- Merged pull requests: 39
- Bot issues: 0
- Bot pull requests: 0
Past Year
- Issues: 1
- Pull requests: 0
- Average time to close issues: 2 days
- Average time to close pull requests: N/A
- Issue authors: 1
- Pull request authors: 0
- Average comments per issue: 0.0
- Average comments per pull request: 0
- Merged pull requests: 0
- Bot issues: 0
- Bot pull requests: 0
Top Authors
Issue Authors
- AlexanderFabisch (28)
- manuel-koch (5)
- LachlanGray (1)
- elle-trudgett (1)
Pull Request Authors
- AlexanderFabisch (40)
- MaartenBehn (9)
Top Labels
Issue Labels
Pull Request Labels
Packages
- Total packages: 1
-
Total downloads:
- pypi 286 last-month
- Total dependent packages: 0
- Total dependent repositories: 1
- Total versions: 11
- Total maintainers: 2
pypi.org: distance3d
Distance computation and collision detection in 3D.
- Homepage: https://github.com/AlexanderFabisch/distance3d
- Documentation: https://distance3d.readthedocs.io/
- License: BSD-3-Clause
-
Latest release: 0.9.0
published over 2 years ago
Rankings
Maintainers (2)
Dependencies
- actions/checkout v2 composite
- actions/setup-python v2 composite
- codecov/codecov-action v1.3.2 composite
- numpy >=1.18
- pytransform3d *