simunex
A high-fidelity dynamic simulation framework.
Science Score: 44.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
○DOI references
-
○Academic publication links
-
○Committers with academic emails
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (17.4%) to scientific vocabulary
Keywords
Repository
A high-fidelity dynamic simulation framework.
Basic Info
Statistics
- Stars: 1
- Watchers: 1
- Forks: 0
- Open Issues: 2
- Releases: 9
Topics
Metadata Files
README.md
![]()
![]()
![]()



A modular high-fidelity dynamic simulation framework that runs on top of Unity.
SimuNEX
SimuNEX is a high-fidelity dynamic simulation framework designed as a modular platform to simulate dynamic systems across various domains. It serves as a powerful tool for researchers, engineering students, and members of the Intelligent Systems Lab, offering a versatile environment for simulating complex systems and phenomena.
Getting Started
- Install Unity: The project is currently developed in Unity 2022.3.10f1 but it may be compatible with other versions.
- Clone Repository: Use your preferred Git client to clone the repository from its GitHub page.
- Open in Unity Editor: This is done by adding the
\UnityProjectfolder in the Unity Editor. You're now all set to start building and simulating dynamic systems!
For any additional details, configurations, or advanced setups, refer to the documentation.
Features
SimuNEX is in its early stages of development and is only usable through the Unity Editor, offering interfaces for building dynamic systems similar to an API. Currently, the following features are available:
- Simulation of single rigid body systems including quadcopters and AUVs (autonomous underwater vehicles).
- Reactive and event-driven simulation - constructed objects can have their properties modified and the changes occur immediately during simulation.
- Environment-based force system where forces are automatically applied to systems within a boundary and removed when exiting the boundary.
- A generic interface that can be used to incorporate different actuators, sensors, loads, and communication components into the system.
- Functional interfaces have been established for actuators such as motors and loads like propellers.
- Automated detection of actuators and sensors with supervisory systems.
- Fault injection for actuators and sensors, including a user-friendly menus for adding and removing faults.
- Support for ROS 2 integration ensures compatibility with current robotics systems.
- Interfaces have also been created for modeling state-space systems, which are widely employed in control theory.
- Various integrating techniques including Euler, Heun, and RK4 steppers are implemented for accurate simulation of dynamical systems.
- A high performance matrix library built on top of eigen3 is incorporated to handle different state-spaces and functionals within the system efficiently.
For upcoming plans and features, please check out the ongoing projects.
Model Examples

Quadcopter |
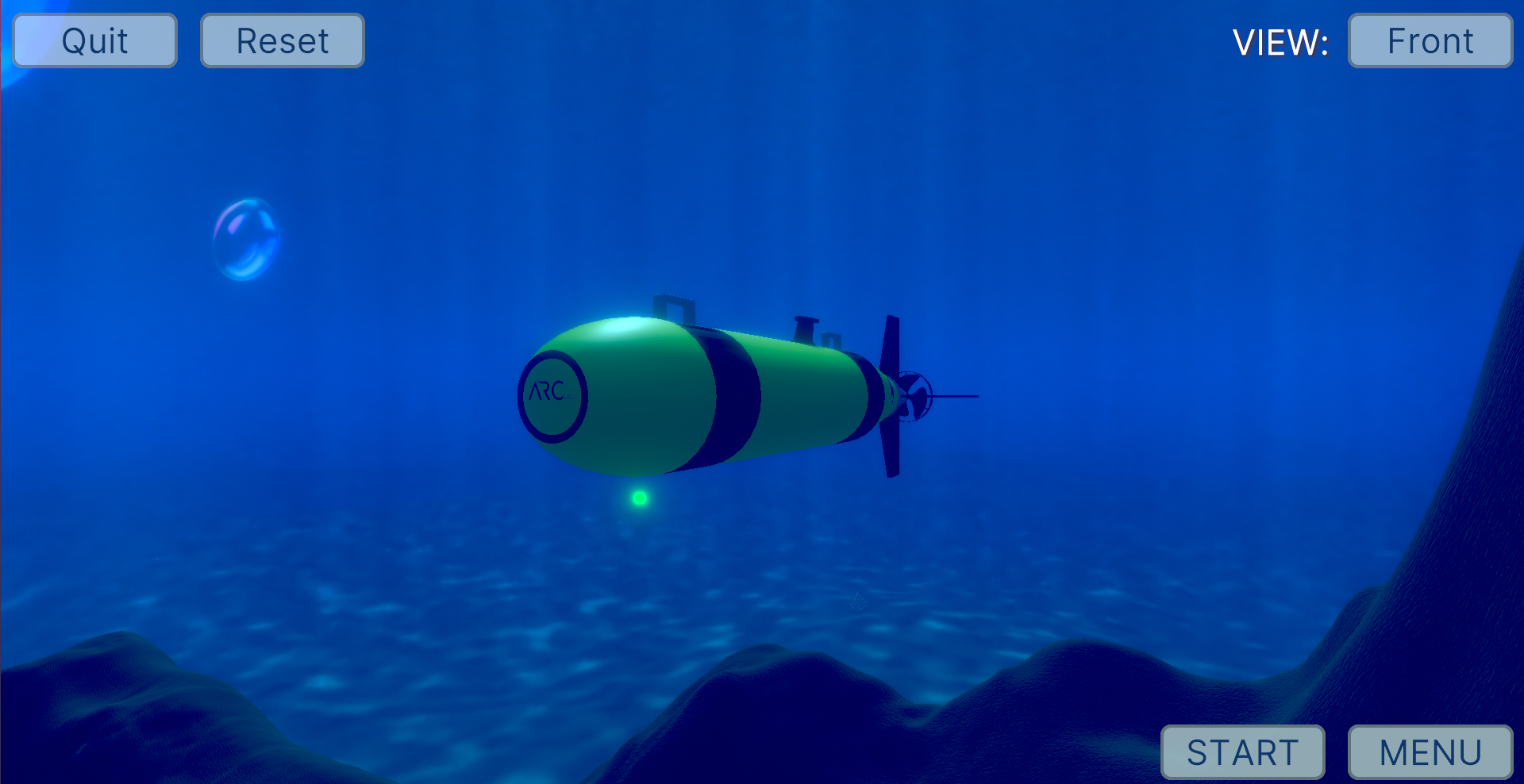
AUV |
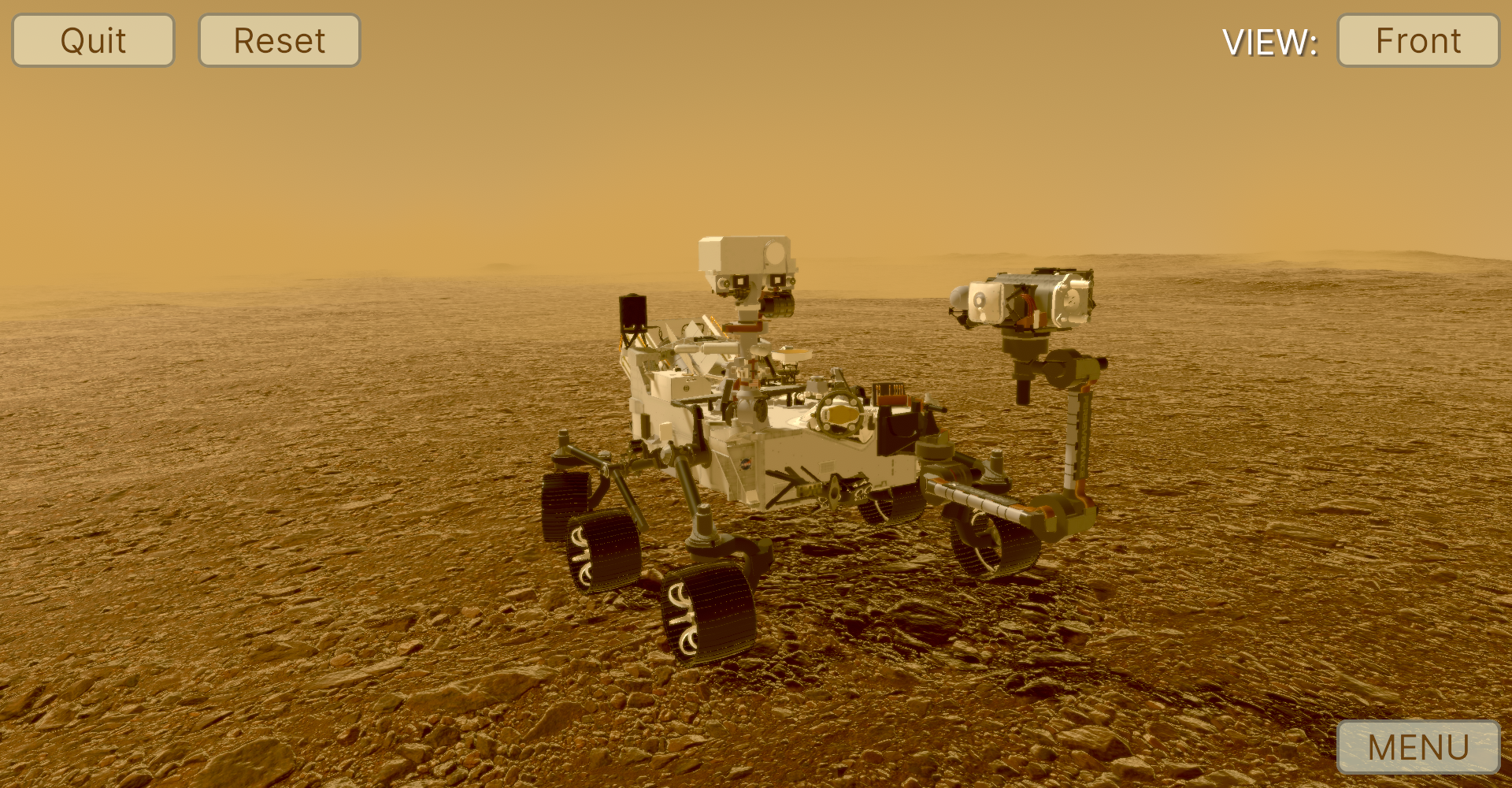
Mars Rover 3D Model by NASA. |
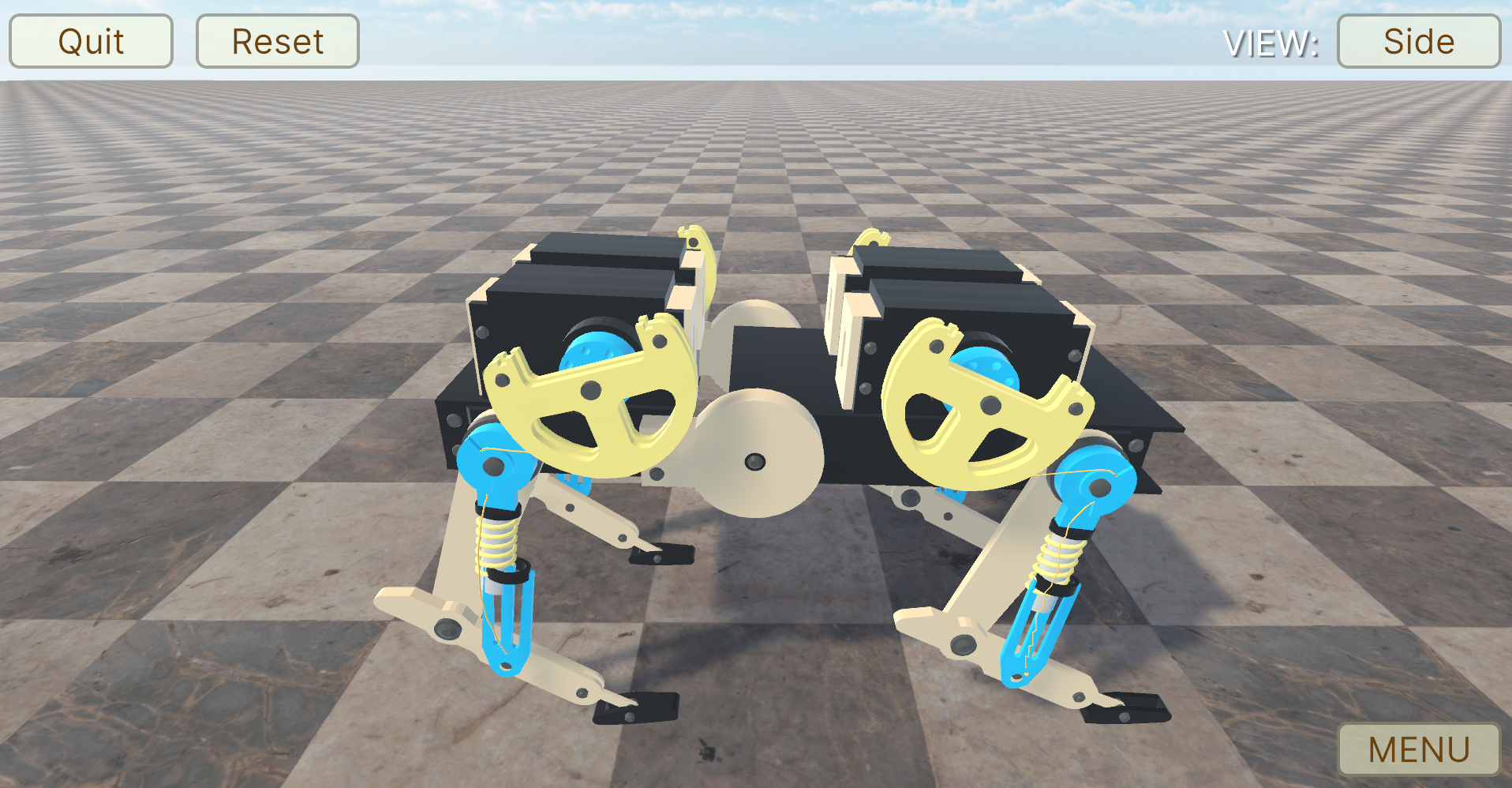
Quadruped Robot |
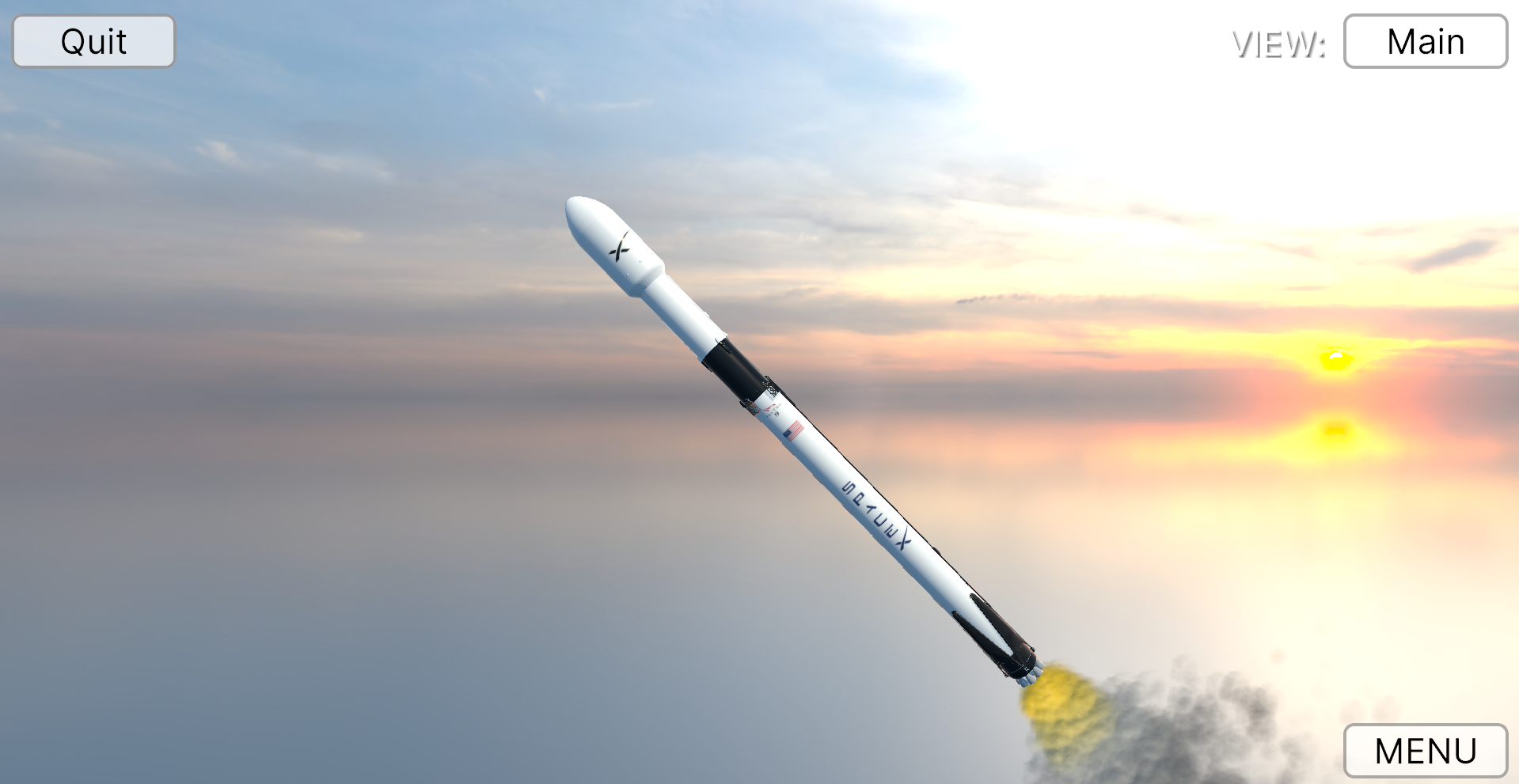
Multi-stage Rocket 3D Model by Stanley Creative. |
Documentation
Our project documentation is hosted on Render and is structured as follows:
- User Documentation: Accessible from the root URL https://simunex-web.onrender.com. This section contains guides, tutorials, and general information about the project.
- Developer Documentation: Accessible at https://simunex-web.onrender.com/dev/. This section, generated by Doxygen, includes detailed API documentation and is intended for developers working with or contributing to the project.
Hosting Documentation Locally
To host the documentation locally, you'll need Docker installed on your system as it provides an isolated environment with all necessary dependencies. The documentation can be hosted using helper scripts included in the repository. Here's how to do it:
Install Docker: Ensure Docker is installed on your system. Visit the Docker Installation Guide for instructions.
Clone the Repository: If you haven't already, clone the repository to your local machine:
sh git clone https://github.com/intelligent-systems-lab-org/SimuNEX.git cd SimuNEXRun the Build Script: Use the
build_docs.shscript (orbuild_docs.baton Windows) to build the Docker image and optionally run the container. This script updates the documentation version using the version specified inpackage.json, builds the Docker image that contains Sphinx and Doxygen documentation, and optionally runs the container locally. To build the Docker image and run the container (making the documentation available onlocalhost):sh ./build_docs.sh --hostAccessing Documentation Locally: Once the container is running, you can access the user documentation at http://localhost and the developer documentation at http://localhost/dev/.
Notes
- The
build_docs.shscript automates the process of setting up and serving the documentation locally. It requires Docker to be installed because it builds the documentation inside Docker containers to ensure a consistent environment. - Running the script with the
--hostflag will start the Docker containers and serve the documentation on your local machine. Without the flag, it will only update the versions in theDoxyfileand sphinx'sconf.pyspecified from thepackage.jsonfile.
Plugins
| Name | Version | Supported OS | Purpose | URL | |---------------|---------|--------------|---------|--------------------------| | ROS2ForUnity | 1.1.0 | Windows, Linux | Communication using ROS 2[^1] | link | | Eigen | 3.4.0 | Windows[^2] | For matrix operations | link | | ErrorProne.NET.CoreAnalyzers | 0.1.2 | Windows | For code analysis and Roslyn support[^3] | link | | NSubstitute (experimental) | 5.1.0 | Windows, Linux | For mock testing | link |
[^1]: Currently on Foxy installations only.
[^2]: Custom C# bindings that only currently support Windows. Separately maintained in another repository. See here.
[^3]: Functions with Visual Studio 2022.
ROS on Windows
ROS 2 was tested on Windows, the ROSOnWindows binary was installed, which can be found here. This binary is provided by Microsoft's IoT team and is designed to simplify the installation process for ROS 2 on Windows. Credit should be given to the ms-iot team for their work on the binary, and their repository can be found here.
License
SimuNEX© 2022-2023 by Lee Bissessar, Intelligent Systems Lab (ISL) is licensed under the SimuNEX License.
Under this license, users may utilize the software for personal or educational purposes and are granted permission to modify and redistribute the software freely, subject to certain conditions outlined in the full license. These conditions include restrictions against commercial and military use, requirements for attribution, and guidelines for redistribution of altered versions.
Please note that the SimuNEX License supersedes the previous CC-BY-NC-SA-4 International License. For a detailed overview of the terms and conditions, please refer to the LICENSE file.
Owner
- Name: Intelligent Systems Lab
- Login: intelligent-systems-lab-org
- Kind: organization
- Website: https://intelsyslab.com/
- Repositories: 1
- Profile: https://github.com/intelligent-systems-lab-org
Impact through Systems Learning
Citation (CITATION.cff)
cff-version: 1.2.0 message: "If you use this software, please cite it as below." authors: - given-names: Lee Bissessar title: "SimuNEX" date-released: 2023 url: "https://github.com/intelligent-systems-lab-org/SimuNEX"
GitHub Events
Total
- Push event: 2
Last Year
- Push event: 2
Committers
Last synced: over 2 years ago
Top Committers
| Name | Commits | |
|---|---|---|
| leebissessar5 | l****r@g****m | 231 |
| Conventional Changelog Action | c****n@g****m | 13 |
| Lee Bissessar | 1****5 | 3 |
Committer Domains (Top 20 + Academic)
Issues and Pull Requests
Last synced: about 1 year ago
All Time
- Total issues: 21
- Total pull requests: 13
- Average time to close issues: 4 days
- Average time to close pull requests: 6 minutes
- Total issue authors: 1
- Total pull request authors: 1
- Average comments per issue: 0.81
- Average comments per pull request: 0.0
- Merged pull requests: 13
- Bot issues: 0
- Bot pull requests: 0
Past Year
- Issues: 0
- Pull requests: 0
- Average time to close issues: N/A
- Average time to close pull requests: N/A
- Issue authors: 0
- Pull request authors: 0
- Average comments per issue: 0
- Average comments per pull request: 0
- Merged pull requests: 0
- Bot issues: 0
- Bot pull requests: 0
Top Authors
Issue Authors
- leebissessar5 (13)
Pull Request Authors
- leebissessar5 (11)
Top Labels
Issue Labels
Pull Request Labels
Dependencies
- TriPSs/conventional-changelog-action latest composite
- actions/checkout v4 composite
- softprops/action-gh-release v1 composite
- nginx latest build
- python 3.9 build
- ubuntu latest build
- simunex-docs dev
- Sphinx *
- myst-parser *
- pydata_sphinx_theme *