safe-control-gym
https://github.com/autonomous-drone-racing-lab/safe-control-gym
Science Score: 54.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
○DOI references
-
✓Academic publication links
Links to: arxiv.org -
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (10.9%) to scientific vocabulary
Repository
Basic Info
- Host: GitHub
- Owner: Autonomous-Drone-Racing-Lab
- License: mit
- Language: Python
- Default Branch: lsy_drone_racing
- Size: 158 MB
Statistics
- Stars: 0
- Watchers: 0
- Forks: 0
- Open Issues: 0
- Releases: 0
Metadata Files
README.md
IROS 2022 Safe Robot Learning Competition
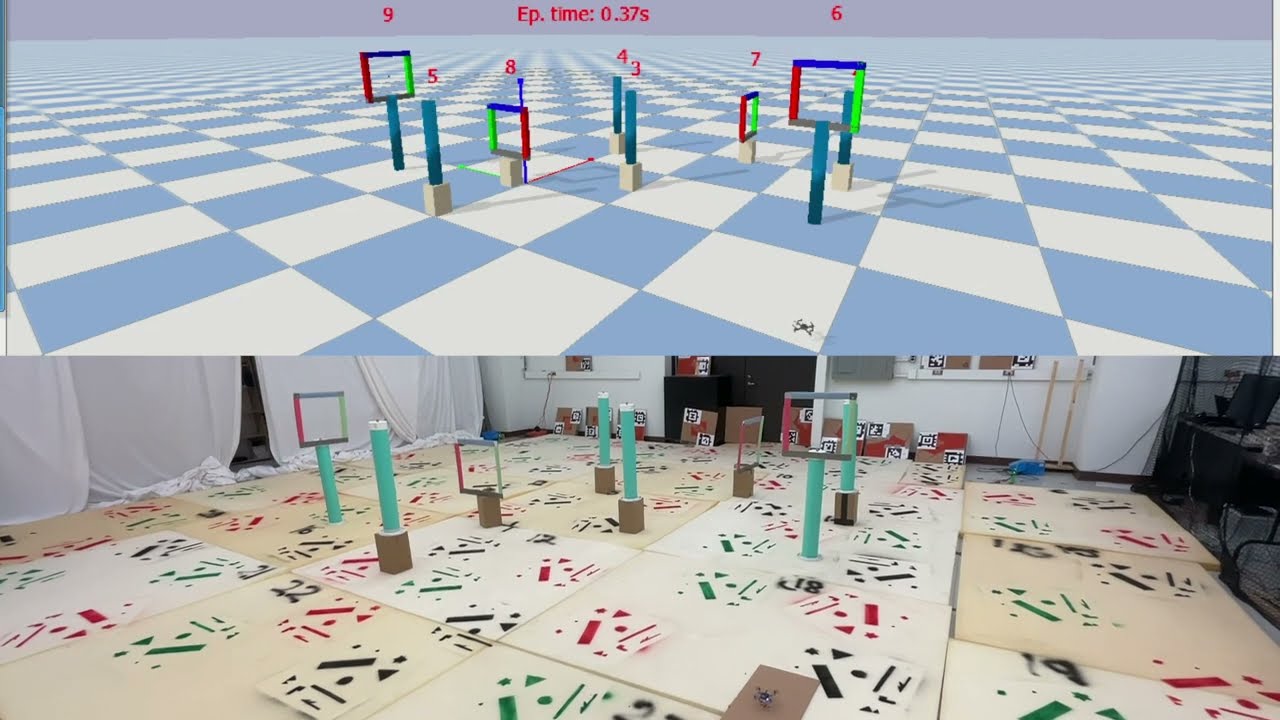
(The image above links to the video of a flight example)
- Official Webpage
- IROS Competition Page
- GitHub Discussions
- Google Form (to register your interest and receive e-mail updates)
Description
The task is to design a controller/planner that enables a quadrotor (Crazyflie 2.x) to safely fly through a set of gates and reach a predefined target despite uncertainties in the robot dynamics (e.g., mass and inertia) and the environment (e.g., wind and position of the gates). The algorithms will be evaluated regarding their safety (e.g., no collisions) and performance (e.g., time to target). We encourage participants to explore both control and reinforcement learning approaches (e.g., robust, adaptive, predictive, learning-based and optimal control, and model-based/model-free reinforcement learning). The controller/planner has access to the position and attitude measurements provided by a motion capture system and the noisy pose of the closest next gate. The controller can send position, velocity, acceleration and heading references to an onboard position controller.
Install on Ubuntu/macOS
We recommend Ubuntu 20.04 on a mid-tier laptop and GPU (e.g., a Lenovo P52 with i7-8850H/Quadro P2000)
bash
git clone https://github.com/utiasDSL/safe-control-gym.git
cd safe-control-gym
git checkout beta-iros-competition
Create and access a Python 3.8 environment using
conda
bash
conda create -n safe python=3.8
conda activate safe
Install the safe-control-gym repository
bash
pip install --upgrade pip
pip install -e .
Install pycffirmware
bash
cd ..
git clone https://github.com/utiasDSL/pycffirmware.git
cd pycffirmware/
git submodule update --init --recursive
On Ubuntu
bash
sudo apt update
sudo apt -y install swig
sudo apt install build-essential
cd wrapper/
chmod +x build_linux.sh
conda activate safe
./build_linux.sh
On macOS
Install brew, then
bash
brew install swig
brew install gcc # Also run `xcode-select --install` if prompted
brew install make
cd wrapper/
chmod +x build_osx.sh # Assumes `gcc` is at `/usr/local/bin/gcc-12`
conda activate safe
./build_osx.sh
Also see how to install SWIG and pycffirmware's README.md
Getting Started
Run the scripts in competition/
bash
cd ../../safe-control-gym/competition/
python3 getting_started.py --overrides ./getting_started.yaml
Modify file edit_this.py to customize your controller based on Crazyswarm's Crazyflie interface
Development and Evaluation Scenarios
A complete problem is specified by a YAML file, e.g. getting_started.yaml
Proposed solutions will be evaluated in 5 scenarios with different challenges:
| Evaluation Scenario | Constraints | Rand. Inertial Properties | Randomized Obstacles, Gates | Rand. Between Episodes | Notes |
| :-----------------: | :----------: | :-----------------------: | :-------------------------: | :--------------------: | :---: |
| level0.yaml | Yes | No | No | No | Perfect knowledge |
| level1.yaml | Yes | Yes | No | No | Adaptive |
| level2.yaml | Yes | Yes | Yes | No | Learning, re-planning |
| level3.yaml | Yes | Yes | Yes | Yes | Robustness |
| | | | | | |
| sim2real | Yes | Real-life hardware | Yes, injected | No | Sim2real transfer |
"Rand. Between Episodes" (governed by argument
reseed_on_reset) states whether randomized properties and positions vary or are kept constant (by re-seeding the random number generator on eachenv.reset()) across episodesNote 1: the random seed used to score solution will be picked at the time of the competition
Note 2: if the base scenarios do not allow to determine a unique winner, we will progressively raise the difficulty by, alternately, (i) adding intermediate gates and (ii) increasing the parameters of the random distributions and input/dynamics disturbances by 50% (except in
level0).
Implement Your Controller/Solution
Methods to Re-implement in edit_this.py
You can also use/create additional custom modules such as example_custom_utils.py
Required (1 of 2)
```docstring editthis.py : Controller.init(initialobs, initial_info) # Initialize the controller
Args:
initial_obs (ndarray): The initial observation of the quadrotor's state
[x, x_dot, y, y_dot, z, z_dot, phi, theta, psi, p, q, r].
initial_info (dict): The a priori problem information as a dictionary with keys
- 'ctrl_timestep' Control time step (in seconds)
- 'ctrl_freq' Control frequency (in Hz)
- 'episode_len_sec' Maximum duration of an episode (in seconds)
- 'nominal_physical_parameters' *Nominal* mass and inertia of the quadrotor
- 'gate_dimensions' Shape and measurements of the gates
- 'obstacle_dimensions' Shape and measurements of the obstacles
- 'nominal_gates_pos_and_type' *Nominal* pose and type (tall, low, etc.) of the gates (NOTE: this is the ordering in which the gates must be traversed)
- 'nominal_obstacles_pos' *Nominal* pose of the obstacles (NOTE: these are provided once, through the controller's constructor, and might differ from the exact positions, if `randomized_gates_and_obstacles` is True, exact positions will also change across episodes if `reseed_on_reset` is False)
- 'x_reference' Final position to reach/hover at
- 'initial_state_randomization' Distributions of the randomized additive error on the initial pose
- 'inertial_prop_randomization' Distributions of the randomized additive error on the inertial properties
- 'gates_and_obs_randomization' Distributions of the randomized additive error on the gates and obstacles positions
- 'disturbances' Distributions of the dynamics and input disturbances
- 'symbolic_model' CasADi's 3D quadrotor dynamics
- 'symbolic_constraints' CasADi's constraints
Returns: N/A
```
Required (2 of 2)
```docstring edit_this.py : Controller.cmdFirmware(time, obs, reward, done, info) # Select the next command for the quadrotor
Args:
time (float): Episode's elapsed time, in seconds.
obs (ndarray): The quadrotor's pose from PyBullet or Vicon
[x, 0, y, 0, z, 0, phi, theta, psi, 0, 0, 0].
reward (float, optional): The reward signal.
done (bool, optional): Wether the episode has terminated.
info (dict, optional): Current step information as a dictionary with keys
- 'current_target_gate_id' ID of the next gate (-1 when all gates have been traveled through)
- 'current_target_gate_type' Type of the next gate (0: tall, 1: low)
- 'current_target_gate_in_range' Boolean, whether the next gate is close enough (i.e., <= VISIBILITY_RANGE == 0.45m) for perfect visibility (affects the value of the next key 'current_target_gate_pos')
- 'current_target_gate_pos' *Nominal* or **exact** position of the next gate (depending on the value of the key above, 'current_target_gate_in_range')
- 'at_goal_position' Boolean, whether the quadrotor is at the final position ('x_reference')
- 'task_completed' Boolean, whether the quadrotor stayed at the final position ('x_reference') for 2''
- 'constraint_values' Constraint evaluations
- 'constraint_violation' Boolean, whether any of the constraints is violated
- 'collision' Collision, as a tuple (collided object id, boolean), note when False, ID==None
Returns:
Command: selected type of command (FINISHED, NONE, FULLSTATE, TAKEOFF, LAND, STOP, GOTO, NOTIFYSETPOINTSTOP, see Enum-like class `Command`).
List: arguments for the type of command
- FINISHED's args: []
- NONE's args: []
- FULLSTATE's args: [pos (3 val), vel (3 val), acc (3 val), yaw, rpy_rates (3 val), curr_time]
- TAKEOFF's args: [height, duration]
- LAND's args: [height, duration]
- STOP's args: []
- GOTO's args: [x, y, z, yaw, duration, relative (bool)]
- NOTIFYSETPOINTSTOP's args: []
Also see: https://github.com/utiasDSL/safe-control-gym/blob/beta-iros-competition/competition/competition_utils.py#L10
and: https://crazyswarm.readthedocs.io/en/latest/api.html#crazyflie-class
```
Optional, recommended for learning, adaptive control (1 of 2)
```docstring edit_this.py : Controller.interStepLearn(...) # Update the controller's internal state at each step
Args:
N/A
Leverage the data in `self.action_buffer`, `self.obs_buffer`, `self.reward_buffer`, self.done_buffer`, `self.info_buffer`
Returns: N/A
```
Optional, recommended for learning, adaptive control (2 of 2)
```docstring edit_this.py : Controller.interEpisodeLearn(...) # Update the controller's internal state between episodes
Args:
N/A
Leverage the data in `self.action_buffer`, `self.obs_buffer`, `self.reward_buffer`, self.done_buffer`, `self.info_buffer`
Returns: N/A
```
Submission
- Fork this repository (help)
- Checkout this branch (
beta-iros-competition) - Implement your solution by modifying
edit_this.py - Create a Pull Request into
utiasDSL/safe-control-gym:beta-iros-competitionfrom your fork (help) - Mention in the Pull Request's Conversation tab (i) how many
num_episodesyou want your solution to use in each level (mandatory) and (ii) what method(s) you used and results you obtained (optional) - Tag @JacopoPan in the Pull Request's Conversation tab
Note: Private Submissions
If you prefer not to publicly disclose your solution implementation, you can instead create a private import of this repository to develop it and give access to @JacopoPan and @utiasDSLadmin, or even send your edit_this.py to jacopo.panerati@utoronto.ca. In this case, please submit early to allow the time to run extra checks.
Scoring (v0.3)
A) For ALL levels (0-3, sim2real), solutions will be evaluated—on the last episode—by:
- Safety: avoid ALL collisions with gates & obstacles and constraint violations—i.e., only runs with 0 collisions/violations will count as TASK COMPLETION
- Performance: minimizing the task time (in sec.) required to complete the task (fly through all the gates and reach the goal)
B) For ALL levels (0-3, sim2real), solutions that accomplish A) will be evaluated—across all episodes—by:
- Data & compute efficiency: minimizing the simulation/flight-clock time of the no. of episodes (in sec.) plus their overall wall-clock learning time (in sec.) used by
interStepLearn()andinterEpisodeLearn()to improve performance
C) For ALL levels (0-3, sim2real), the top 3 solutions ranked by the criteria in A) and the top 3 solutions ranked by the criteria in B) will score 20, 10, and 5 points respectively. The sum of these points will determine the final classification.

Important Dates
- IROS Conference and Competition days: October 24-26, 2022
Prizes
Kindly supported by Bitcraze:
- 1st: Bitcraze Crazyflie AI Bundle
- 2nd: Bitcraze Crazyflie STEM Ranging Bundle
- 3rd: Bitcraze Crazyflie STEM Bundle
The authors of the best solutions will be invited to co-author a "lessons learned" paper with the organizers.
Winners
Congratulations to the winning teams!
- 1st: Team H^2 (Niu Xinyuan, Hashir Zahir, and Huiyu Leong from Singapore)
- 2nd: Team Ekuflie (Michel Hidalgo, Gerardo Puga, Tomas Lorente, Nahuel Espinosa, and John Alejandro Duarte Carrasco from Ekumen)
- 3rd: Team ustc-arg (Kaizheng Zhang, Jian Di, Tao Jin, Xiaohan Li, Yijia Zhou, Xiuhua Liang, and Chenxu Zhang from the University of Science and Technology of China)

A Discussion on the Competition
bibtex
@article{teetaert2023irosslc,
title={A Remote Sim2real Aerial Competition: Fostering Reproducibility and Solutions’ Diversity in Robotics Challenges},
author={Teetaert, Spencer and Zhao, Wenda and Xinyuan, Niu and Zahir, Hashir and Leong, Huiyu and Hidalgo, Michel and Puga, Gerardo and Lorente, Tomas and Espinosa, Nahuel and Carrasco, John Alejandro Duarte and Zhang, Kaizheng and Di, Jian and Jin, Tao and Li, Xiaohan and Zhou, Yijia and Liang, Xiuhua and Zhang, Chenxu and Loquercio, Antonio and Zhou, Siqi and Brunke, Lukas and Greeff, Melissa and Hönig, Wolfgang and Panerati, Jacopo and Schoellig, Angela P.},
journal={arXiv preprint arXiv:2308.16743},
year={2023},
url = {[https://arxiv.org/abs/2108.06266](https://arxiv.org/pdf/2308.16743.pdf)}}
Organizers
- Angela Schoellig (Technische Universität München, University of Toronto, Vector Institute)
- Davide Scaramuzza (University of Zurich)
- Vijay Kumar (University of Pennsylvania)
- Nicholas Roy (Massachusetts Institute of Technology)
- Todd Murphey (Northwestern University)
- Sebastian Trimpe (RWTH Aachen University)
- Wolfgang Hönig (TU Berlin)
- Mark Muller (University of California Berkeley)
- Jose Martinez-Carranza (INAOE)
- SiQi Zhou (University of Toronto, Vector Institute)
- Melissa Greeff (University of Toronto, Vector Institute)
- Jacopo Panerati (University of Toronto, Vector Institute)
- Wenda Zhao (University of Toronto, Vector Institute)
- Spencer Teetaert (University of Toronto)
- Yunlong Song (University of Zurich)
- Leticia Oyuki Rojas Pérez (INAOE)
- Adam W. Hall (University of Toronto, Vector Institute)
- Justin Yuan (University of Toronto, Vector Institute)
- Lukas Brunke (University of Toronto, Vector Institute)
- Antonio Loquercio (UC Berkeley)
University of Toronto's Dynamic Systems Lab / Vector Institute for Artificial Intelligence
Owner
- Name: Autonomous Drone Racing Lab
- Login: Autonomous-Drone-Racing-Lab
- Kind: organization
- Repositories: 1
- Profile: https://github.com/Autonomous-Drone-Racing-Lab
Citation (CITATION.cff)
cff-version: 1.2.0
preferred-citation:
type: article
authors:
- family-names: "Brunke"
given-names: "Lukas"
- family-names: "Greeff"
given-names: "Melissa"
- family-names: "Hall"
given-names: "Adam W."
- family-names: "Yuan"
given-names: "Zhaocong"
- family-names: "Zhou"
given-names: "SiQi"
- family-names: "Panerati"
given-names: "Jacopo"
orcid: "https://orcid.org/0000-0003-2994-5422"
- family-names: "Schoellig"
given-names: "Angela P."
orcid: "https://orcid.org/0000-0003-4012-4668"
doi: "10.0000/00000"
journal: "Annual Review of Control, Robotics, and Autonomous Systems"
month: 1
start: 1 # First page number
end: 35 # Last page number
title: "Safe Learning in Robotics: From Learning-Based Control to Safe Reinforcement Learning"
issue: 1
volume: 1
year: 2021
GitHub Events
Total
Last Year
Dependencies
- actions/checkout v3 composite
- actions/setup-python v3 composite
- Mosek ^9.3.14
- Pillow ^9.0.0
- PyYAML ^6.0
- casadi ^3.5.5
- cvxpy ^1.1.18
- dict-deep ^4.1.2
- gpytorch ^1.6.0
- gym ^0.21.0
- imageio ^2.14.1
- matplotlib ^3.5.1
- munch ^2.5.0
- numpy ^1.22.1
- pandas ^1.4.0
- pybullet ^3.2.0
- python ^3.8.10
- ray ^1.9.2
- rich ^12.5.1
- scikit-optimize ^0.9.0
- tensorboard ^2.8.0
- termcolor ^1.1.0
- torch ^1.10.2