rtron
r:trån is a road space model transformer library for OpenDRIVE, CityGML and beyond
Science Score: 75.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
✓DOI references
Found 10 DOI reference(s) in README -
✓Academic publication links
Links to: zenodo.org -
○Academic email domains
-
✓Institutional organization owner
Organization tum-gis has institutional domain (www.asg.ed.tum.de) -
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (13.9%) to scientific vocabulary
Keywords
Repository
r:trån is a road space model transformer library for OpenDRIVE, CityGML and beyond
Basic Info
- Host: GitHub
- Owner: tum-gis
- License: apache-2.0
- Language: Kotlin
- Default Branch: main
- Homepage: https://rtron.io
- Size: 16 MB
Statistics
- Stars: 54
- Watchers: 9
- Forks: 13
- Open Issues: 7
- Releases: 2
Topics
Metadata Files
README.md
![]()
a road space model transformer library for OpenDRIVE, CityGML and beyond
View Demos
·
Report Bug
·
Request Feature



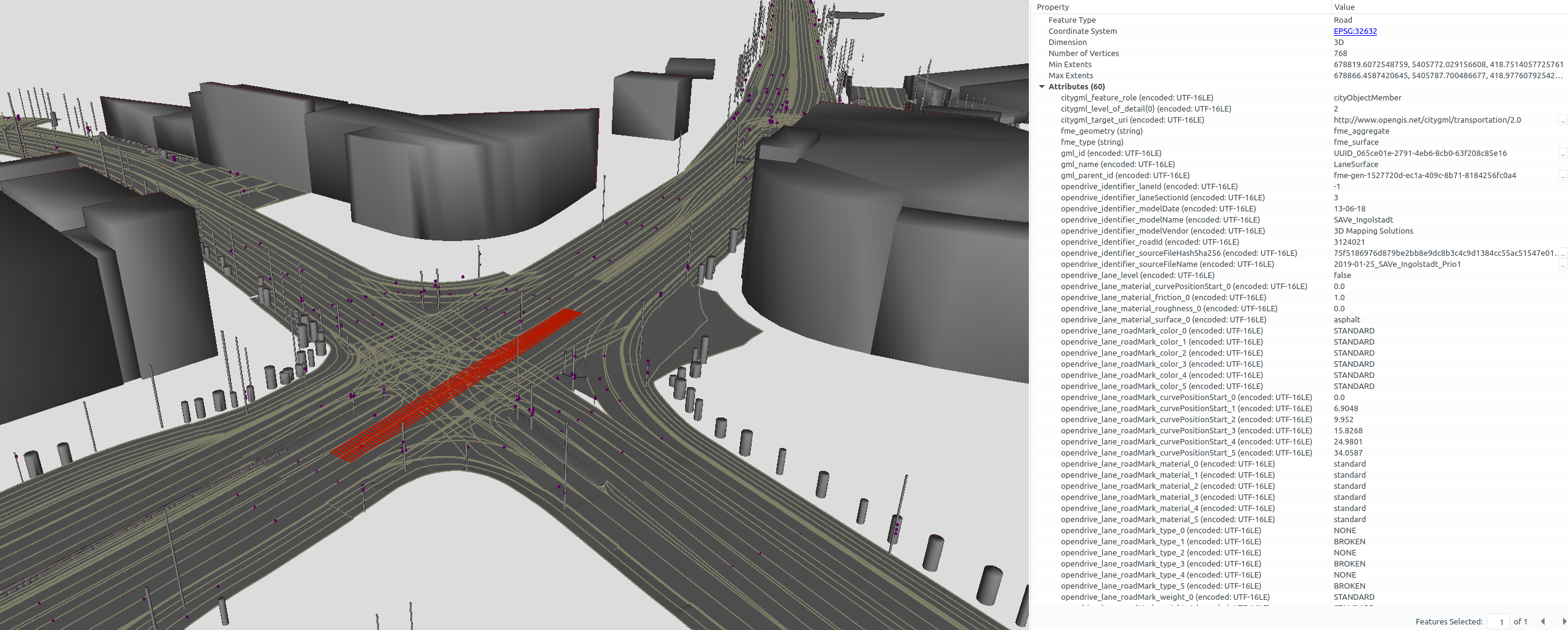
r:trån reads road network models in OpenDRIVE and transforms them to the virtual 3D city model standard CityGML.
This enables you to
- inspect your spatio-semantic road space models
- conduct further model transformations with tools like FME
- perform geospatial analyses on the 3D City Database
- deploy virtual globes
- load your models into a desktop GIS
:inbox_tray: Datasets
Download some sample OpenDRIVE datasets of the city of Ingolstadt from the company 3D Mapping Solutions (initial registration required). Additionally, awesome-openx provides a list of further OpenDRIVE datasets.
:rocket: Usage
In order to use r:trån you need JDK 11 or later. Download the prebuilt JAR executable from the releases section and make sure that you have at least a JVM 11. Run r:trån to ...
```bash
… validate OpenDRIVE datasets
java -jar rtron.jar validate-opendrive ./input-opendrive ./output-reports
… transform OpenDRIVE datasets to CityGML
java -jar rtron.jar opendrive-to-citygml ./input-opendrive ./output-citygml ```
R:trån recursively iterates over your OpenDRIVE input datasets and creates the same directory structure for the output folder.
:construction_worker: Building
Clone the repo and let gradle build it:
bash
./gradlew shadowJar # build the uber-jar
cd rtron-cli/build/libs
java -jar rtron-*.jar
You're good to go :muscle:
:hammerandwrench: Contributing
r:trån was developed so that everyone can benefit from spatio-semantic road space models. Therefore, bug fixes, issue reports and contributions are greatly appreciated.
:mortar_board: Research
The software r:trån can be cited using the ![]() .
.
If you use this software, please cite one of the supplemental research articles: - Spatio-Semantic Road Space Modeling for Vehicle-Pedestrian Simulation to Test Automated Driving Systems - Validation of Parametric OpenDRIVE Road Space Models
These papers may also be of interest: * Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model * Requirement Analysis of 3D Road Space Models for Automated Driving * CityGML and the streets of New York - A proposal for detailed street space modelling
:memo: License
r:trån is distributed under the Apache License 2.0. See LICENSE for more information.
:handshake: Thanks
- Lutz Morich and AUDI AG for providing an awesome work environment within SAVe
- Prof. Thomas H. Kolbe, Bruno Willenborg and Christof Beil for support and feedback
- Claus Nagel for citygml4j
- JetBrains for Kotlin and their top-notch IDEs
Owner
- Name: Chair of Geoinformatics, Technical University of Munich
- Login: tum-gis
- Kind: organization
- Location: Munich, Germany (LAT 48.149456, LON 11.568161)
- Website: https://www.asg.ed.tum.de/en/gis/
- Repositories: 85
- Profile: https://github.com/tum-gis
This is the official GitHub page of the Chair of Geoinformatics, TUM School of Engineering and Design, Technical University of Munich.
Citation (CITATION.cff)
cff-version: 1.2.2 authors: - family-names: "Schwab" given-names: "Benedikt" orcid: "https://orcid.org/0000-0002-4618-2538" - family-names: "Beil" given-names: "Christof" orcid: "https://orcid.org/0000-0002-6231-2769" - family-names: "Kolbe" given-names: "Thomas H." orcid: "https://orcid.org/0000-0003-1456-0423" title: "r:trån" date-released: 2020-06-02 url: "https://github.com/tum-gis/rtron"
GitHub Events
Total
- Watch event: 10
- Delete event: 4
- Push event: 39
- Fork event: 1
- Create event: 3
Last Year
- Watch event: 10
- Delete event: 4
- Push event: 39
- Fork event: 1
- Create event: 3
Issues and Pull Requests
Last synced: about 3 years ago
All Time
- Total issues: 32
- Total pull requests: 4
- Average time to close issues: about 2 months
- Average time to close pull requests: 10 days
- Total issue authors: 7
- Total pull request authors: 1
- Average comments per issue: 1.47
- Average comments per pull request: 1.0
- Merged pull requests: 0
- Bot issues: 0
- Bot pull requests: 4
Past Year
- Issues: 15
- Pull requests: 4
- Average time to close issues: 21 days
- Average time to close pull requests: 10 days
- Issue authors: 5
- Pull request authors: 1
- Average comments per issue: 1.73
- Average comments per pull request: 1.0
- Merged pull requests: 0
- Bot issues: 0
- Bot pull requests: 4
Top Authors
Issue Authors
- beneschwab (11)
- ChBeil (5)
- MatteoRagni (3)
- joergsi (2)
- karanfc (2)
- benediktschwab (1)
- Son-HNguyen (1)
- felix-mu (1)
- CodeMazeSolver (1)
Pull Request Authors
- dependabot[bot] (3)
Top Labels
Issue Labels
Pull Request Labels
Dependencies
- actions/checkout v2.4.0 composite
- actions/setup-java v2.5.0 composite
- netlify/actions/cli master composite
- actions/checkout v2.4.0 composite
- actions/setup-java v2.5.0 composite
- actions/checkout v2.4.0 composite
- gradle/wrapper-validation-action v1.0.4 composite
- openjdk 11.0.12-jdk-buster build