rf-detr
RF-DETR is a real-time object detection model architecture developed by Roboflow, SOTA on COCO and designed for fine-tuning.
Science Score: 64.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
○DOI references
-
✓Academic publication links
Links to: arxiv.org -
✓Committers with academic emails
1 of 14 committers (7.1%) from academic institutions -
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (10.1%) to scientific vocabulary
Keywords
Keywords from Contributors
Scientific Fields
Repository
RF-DETR is a real-time object detection model architecture developed by Roboflow, SOTA on COCO and designed for fine-tuning.
Basic Info
- Host: GitHub
- Owner: roboflow
- License: apache-2.0
- Language: Python
- Default Branch: develop
- Homepage: https://rfdetr.roboflow.com
- Size: 9.36 MB
Statistics
- Stars: 2,871
- Watchers: 37
- Forks: 327
- Open Issues: 121
- Releases: 1
Topics
Metadata Files
README.md
RF-DETR: SOTA Real-Time Object Detection Model
![]()


![]()


RF-DETR is a real-time, transformer-based object detection model developed by Roboflow and released under the Apache 2.0 license.
RF-DETR-N outperforms YOLO11-N by 10 mAP points on the Microsoft COCO benchmark while running faster at inference. On RF100-VL, RF-DETR achieves state-of-the-art results, with RF-DETR-M beating YOLO11-M by an average of 5 mAP points across aerial datasets including drone, satellite, and radar.
News
2025/09/02: RF-DETR fine-tuning YouTube tutorial released. Learn step-by-step how to fine-tune RF-DETR on your custom dataset.2025/07/23: Released three new checkpoints for RF-DETR: Nano, Small, and Medium.2025/05/16: Addedoptimize_for_inferencemethod, improving native PyTorch inference speed by up to 2x depending on platform.2025/04/03: Introduced early stopping, gradient checkpointing, metric saving, training resume, TensorBoard, and W&B logging.2025/03/20: Released RF-DETR real-time object detection model. Code and checkpoints for RF-DETR-Large and RF-DETR-Base are available.
Results
RF-DETR achieves state-of-the-art performance on both the Microsoft COCO and the RF100-VL benchmarks.
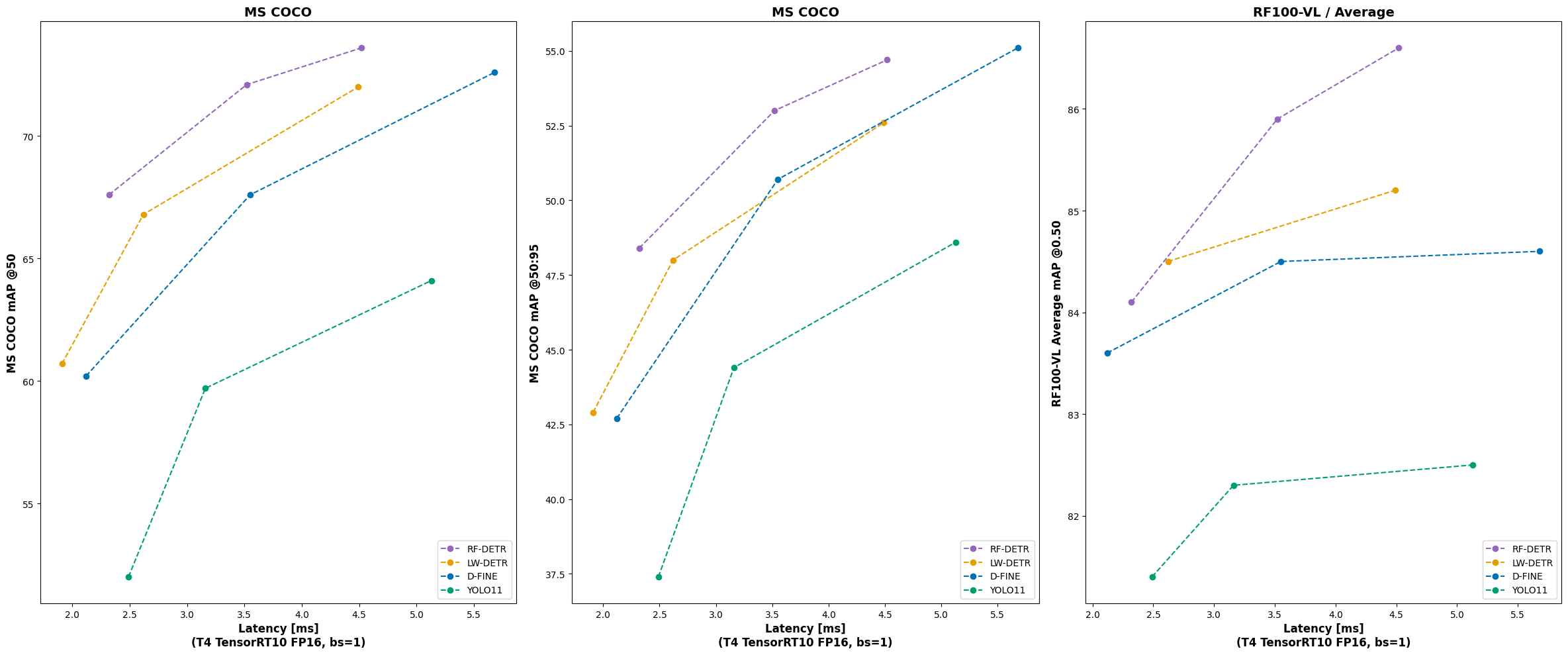
| Architecture | COCO AP50 | COCO AP50:95 | RF100VL AP50 | RF100VL AP50:95 | Latency (ms) | Params (M) | |:------------:|:--------------------:|:--------------------------:|:--------------------------:|:---------------------------:|:---------------:|:------------:| | RF-DETR-N | 67.6 | 48.4 | 84.1 | 57.1 | 2.32 | 30.5 | | RF-DETR-S | 72.1 | 53.0 | 85.9 | 59.6 | 3.52 | 32.1 | | RF-DETR-M | 73.6 | 54.7 | 86.6 | 60.6 | 4.52 | 33.7 | | YOLO11-N | 52.0 | 37.4 | 81.4 | 55.3 | 2.49 | 2.6 | | YOLO11-S | 59.7 | 44.4 | 82.3 | 56.2 | 3.16 | 9.4 | | YOLO11-M | 64.1 | 48.6 | 82.5 | 56.5 | 5.13 | 20.1 | | YOLO11-L | 65.3 | 50.2 | x | x | 6.65 | 25.3 | | YOLO11-X | 66.5 | 51.2 | x | x | 11.92 | 56.9 | | LW-DETR-T | 60.7 | 42.9 | x | x | 1.91 | 12.1 | | LW-DETR-S | 66.8 | 48.0 | 84.5 | 58.0 | 2.62 | 14.6 | | LW-DETR-M | 72.0 | 52.6 | 85.2 | 59.4 | 4.49 | 28.2 | | D-FINE-N | 60.2 | 42.7 | 83.6 | 57.7 | 2.12 | 3.8 | | D-FINE-S | 67.6 | 50.7 | 84.5 | 59.9 | 3.55 | 10.2 | | D-FINE-M | 72.6 | 55.1 | 84.6 | 60.2 | 5.68 | 19.2 |
See our benchmark notes in the RF-DETR documentation.
We are actively working on RF-DETR Large and X-Large models using the same techniques we used to achieve the strong accuracy that RF-DETR Medium attains. This is why RF-DETR Large and X-Large is not yet reported on our pareto charts and why we haven't benchmarked other models at similar sizes. Check back in the next few weeks for the launch of new RF-DETR Large and X-Large models.
Installation
To install RF-DETR, install the rfdetr package in a Python>=3.9 environment with pip:
bash
pip install rfdetr
Install from source
By installing RF-DETR from source, you can explore the most recent features and enhancements that have not yet been officially released. Please note that these updates are still in development and may not be as stable as the latest published release. ```bash pip install git+https://github.com/roboflow/rf-detr.git ```
Inference
The easiest path to deployment is using Roboflow's Inference package.
The code below lets you run rfdetr-base on an image:
```python import os import supervision as sv from inference import get_model from PIL import Image from io import BytesIO import requests
url = "https://media.roboflow.com/dog.jpeg" image = Image.open(BytesIO(requests.get(url).content))
model = get_model("rfdetr-base")
predictions = model.infer(image, confidence=0.5)[0]
detections = sv.Detections.from_inference(predictions)
labels = [prediction.class_name for prediction in predictions.predictions]
annotatedimage = image.copy() annotatedimage = sv.BoxAnnotator(color=sv.ColorPalette.ROBOFLOW).annotate(annotatedimage, detections) annotatedimage = sv.LabelAnnotator(color=sv.ColorPalette.ROBOFLOW).annotate(annotated_image, detections, labels) ```
Predict
You can also use the .predict method to perform inference during local development. The .predict() method accepts various input formats, including file paths, PIL images, NumPy arrays, and torch tensors. Please ensure inputs use RGB channel order. For torch.Tensor inputs specifically, they must have a shape of (3, H, W) with values normalized to the [0..1) range. If you don't plan to modify the image or batch size dynamically at runtime, you can also use .optimize_for_inference() to get up to 2x end-to-end speedup, depending on platform.
```python import io import requests import supervision as sv from PIL import Image from rfdetr import RFDETRBase from rfdetr.util.cococlasses import COCOCLASSES
model = RFDETRBase()
model.optimizeforinference()
url = "https://media.roboflow.com/notebooks/examples/dog-2.jpeg"
image = Image.open(io.BytesIO(requests.get(url).content)) detections = model.predict(image, threshold=0.5)
labels = [ f"{COCOCLASSES[classid]} {confidence:.2f}" for classid, confidence in zip(detections.classid, detections.confidence) ]
annotatedimage = image.copy() annotatedimage = sv.BoxAnnotator().annotate(annotatedimage, detections) annotatedimage = sv.LabelAnnotator().annotate(annotated_image, detections, labels)
sv.plotimage(annotatedimage) ```
Train a Model
You can fine-tune an RF-DETR Nano, Small, Medium, and Base model with a custom dataset using the rfdetr Python package.
Read our training tutorial to get started
Documentation
Visit our documentation website to learn more about how to use RF-DETR.
License
Both the code and the weights pretrained on the COCO dataset are released under the Apache 2.0 license.
Acknowledgements
Our work is built upon LW-DETR, DINOv2, and Deformable DETR. Thanks to their authors for their excellent work!
Citation
If you find our work helpful for your research, please consider citing the following BibTeX entry.
bibtex
@software{rf-detr,
author = {Robinson, Isaac and Robicheaux, Peter and Popov, Matvei},
license = {Apache-2.0},
title = {RF-DETR},
howpublished = {\url{https://github.com/roboflow/rf-detr}},
year = {2025},
note = {SOTA Real-Time Object Detection Model}
}
Contribute
We welcome and appreciate all contributions! If you notice any issues or bugs, have questions, or would like to suggest new features, please open an issue or pull request. By sharing your ideas and improvements, you help make RF-DETR better for everyone.
Owner
- Name: Roboflow
- Login: roboflow
- Kind: organization
- Email: hello@roboflow.com
- Location: United States of America
- Website: https://roboflow.com
- Twitter: roboflow
- Repositories: 142
- Profile: https://github.com/roboflow
Citation (CITATION.cff)
cff-version: 1.2.0
title: "RF-DETR"
message: >-
If you use this software, please cite it using the
metadata from this file.
type: software
authors:
- family-names: Robinson
given-names: Isaac
email: isaac@roboflow.com
affiliation: Roboflow
- family-names: Robicheaux
given-names: Peter
email: peter@roboflow.com
affiliation: Roboflow
- family-names: Popov
given-names: Matvei
email: matvei@roboflow.com
affiliation: Roboflow
repository-code: 'https://github.com/roboflow/rf-detr'
abstract: 'A state-of-the-art, real-time object detection model developed by Roboflow.'
date-released: 2025-03-20
keywords:
- object detection
- computer vision
- rf-detr
- detr
license: "Apache-2.0"
Committers
Last synced: about 1 year ago
Top Committers
| Name | Commits | |
|---|---|---|
| Piotr Skalski | p****2@g****m | 47 |
| Peter Robicheaux | p****r@r****m | 36 |
| Matvezy | m****v@t****u | 34 |
| Isaac Robinson | i****c@r****m | 19 |
| James | j****g@j****g | 12 |
| Onuralp SEZER | t****r@g****m | 8 |
| Mario da Graca | m****a@g****e | 7 |
| Leonidas Valavanis | v****s@g****m | 3 |
| farukalamai | m****2@g****m | 2 |
| Fabio Milentiansen Sim | f****m@g****m | 1 |
| Fazri Gading | s****0@g****m | 1 |
| Joseph Nelson | j****2@g****m | 1 |
| Lyuboslav Petrov | p****v@g****m | 1 |
| Gaétan Dubuc | g****1@g****m | 1 |
Committer Domains (Top 20 + Academic)
Issues and Pull Requests
Last synced: 10 months ago
All Time
- Total issues: 119
- Total pull requests: 54
- Average time to close issues: 6 days
- Average time to close pull requests: 3 days
- Total issue authors: 91
- Total pull request authors: 27
- Average comments per issue: 2.97
- Average comments per pull request: 1.67
- Merged pull requests: 21
- Bot issues: 0
- Bot pull requests: 0
Past Year
- Issues: 119
- Pull requests: 54
- Average time to close issues: 6 days
- Average time to close pull requests: 3 days
- Issue authors: 91
- Pull request authors: 27
- Average comments per issue: 2.97
- Average comments per pull request: 1.67
- Merged pull requests: 21
- Bot issues: 0
- Bot pull requests: 0
Top Authors
Issue Authors
- robmarkcole (7)
- BotaoPeng98 (5)
- LeMinhNgan (4)
- Kallinteris-Andreas (3)
- Ryan-Marchi (3)
- Wangwang99999 (3)
- panagiotamoraiti (3)
- fdarvas (3)
- XiphosF (3)
- Abdul-Mukit (3)
- mkrupczak3 (3)
- DoniaDriss12 (3)
- SebastianJanampa (3)
- SilvaneUX (3)
- GitGura (2)
Pull Request Authors
- probicheaux (22)
- isaacrob-roboflow (18)
- Matvezy (17)
- SkalskiP (9)
- developer0hye (6)
- onuralpszr (6)
- valavanisleonidas (4)
- sergiovillanueva (3)
- capjamesg (3)
- mario-dg (3)
- farukalamai (2)
- Ahmed-Samir11 (2)
- panagiotamoraiti (2)
- rajatprasun (2)
- surya3214 (2)
Top Labels
Issue Labels
Pull Request Labels
Packages
- Total packages: 2
-
Total downloads:
- pypi 23,595 last-month
-
Total dependent packages: 0
(may contain duplicates) -
Total dependent repositories: 0
(may contain duplicates) - Total versions: 16
- Total maintainers: 4
pypi.org: rfdetr-isarsoft
RF-DETR
- Homepage: https://github.com/roboflow/rf-detr
- Documentation: https://rfdetr-isarsoft.readthedocs.io/
- License: Apache License 2.0
-
Latest release: 1.1.0
published about 1 year ago
Rankings
Maintainers (1)
pypi.org: rfdetr
RF-DETR
- Homepage: https://github.com/roboflow/rf-detr
- Documentation: https://rfdetr.readthedocs.io/
- License: Apache License 2.0
-
Latest release: 1.2.1
published 12 months ago
Rankings
Maintainers (3)
Dependencies
- onnx *
- onnx_graphsurgeon *
- onnxruntime *
- onnxruntime-gpu *
- onnxsim *
- polygraphy *
- pycuda *
- tensorrt >=8.6.1
- actions/checkout 11bd71901bbe5b1630ceea73d27597364c9af683 composite
- astral-sh/setup-uv 22695119d769bdb6f7032ad67b9bca0ef8c4a174 composite
- pypa/gh-action-pypi-publish 76f52bc884231f62b9a034ebfe128415bbaabdfc composite
- actions/checkout 11bd71901bbe5b1630ceea73d27597364c9af683 composite
- astral-sh/setup-uv 22695119d769bdb6f7032ad67b9bca0ef8c4a174 composite
- pypa/gh-action-pypi-publish 76f52bc884231f62b9a034ebfe128415bbaabdfc composite