multiscalearrays.jl-f9640e96-87f6-5992-9c3b-0743c6a49ffa
Last mirrored from https://github.com/JuliaDiffEq/MultiScaleArrays.jl.git on 2019-11-19T01:58:24.98-05:00 by @UnofficialJuliaMirrorBot via Travis job 481.24 , triggered by Travis cron job on branch "master"
https://github.com/unofficialjuliamirror/multiscalearrays.jl-f9640e96-87f6-5992-9c3b-0743c6a49ffa
Science Score: 18.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
○codemeta.json file
-
○.zenodo.json file
-
○DOI references
-
○Academic publication links
-
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (12.8%) to scientific vocabulary
Repository
Last mirrored from https://github.com/JuliaDiffEq/MultiScaleArrays.jl.git on 2019-11-19T01:58:24.98-05:00 by @UnofficialJuliaMirrorBot via Travis job 481.24 , triggered by Travis cron job on branch "master"
Basic Info
- Host: GitHub
- Owner: UnofficialJuliaMirror
- License: other
- Language: Julia
- Default Branch: master
- Size: 118 KB
Statistics
- Stars: 0
- Watchers: 1
- Forks: 0
- Open Issues: 0
- Releases: 0
Metadata Files
README.md
MultiScaleArrays


![]()
![]()
MultiScaleArrays.jl allows you to easily build multiple scale models which are
fully compatible with native Julia scientific computing packages like
DifferentialEquations.jl or Optim.jl. These models utilize
a tree structure to describe phenomena of multiple scales, but the interface allows
you to describe equations on different levels, using aggregations from lower
levels to describe complex systems. Their structure allows for complex and dynamic
models to be developed with only a small performance difference. In the end, they present
themselves as an AbstractArray to standard solvers, allowing them to be used
in place of a Vector in any appropriately made Julia package.
Example
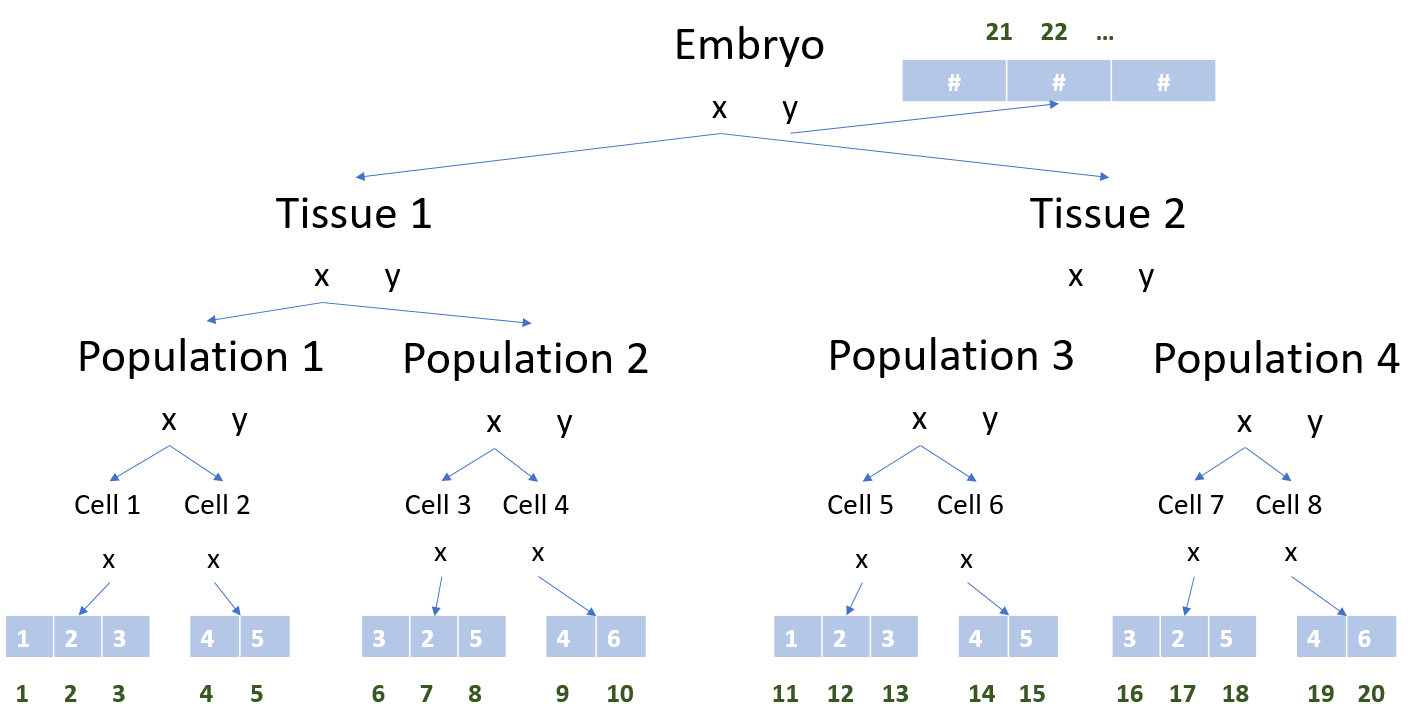
The usage is best described by an example. Here we build a hierarchy where Embryos contain Tissues which contain Populations which contain Cells, and the cells contain proteins whose concentrations are modeled as simply a vector of numbers (it can be anything linearly indexable).
julia
using MultiScaleArrays
struct Cell{B} <: AbstractMultiScaleArrayLeaf{B}
values::Vector{B}
end
struct Population{T<:AbstractMultiScaleArray,B<:Number} <: AbstractMultiScaleArray{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
end
struct Tissue{T<:AbstractMultiScaleArray,B<:Number} <: AbstractMultiScaleArray{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
end
struct Embryo{T<:AbstractMultiScaleArray,B<:Number} <: AbstractMultiScaleArrayHead{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
end
This setup defines a type structure which is both a tree and an array. A picture of a possible version is the following:
Let's build a version of this. Using the constructors we can directly construct leaf types:
julia
cell1 = Cell([1.0; 2.0; 3.0])
cell2 = Cell([4.0; 5.0])
and build types higher up in the hierarchy by using the constuct method. The method
is construct(T::AbstractMultiScaleArray, nodes, values), though if values is not given it's
taken to be empty.
julia
cell3 = Cell([3.0; 2.0; 5.0])
cell4 = Cell([4.0; 6.0])
population2 = construct(Population, deepcopy([cell1, cell3, cell4]))
population3 = construct(Population, deepcopy([cell1, cell3, cell4]))
tissue1 = construct(Tissue, deepcopy([population, population2, population3])) # Make a Tissue from Populations
tissue2 = construct(Tissue, deepcopy([population2, population, population3]))
embryo = construct(Embryo, deepcopy([tissue1, tissue2])) # Make an embryo from Tissues
Indexing and Iteration
The head node then acts as the king. It is designed to have functionality which mimics a vector in order for usage in DifferentialEquations or Optim. So for example
julia
embryo[12]
returns the "12th protein", counting by Embryo > Tissue > Population > Cell in order
of the vectors. The linear indexing exists for every AbstractMultiScaleArray.
These types act as full linear vectors, so standard operations do the sensical
operations:
julia
embryo[10] = 4.0 # changes protein concentration 10
embryo[2,3,1] # Gives the 1st cell in the 3rd population of the second tissue
embryo[:] # generates a vector of all of the protein concentrations
eachindex(embryo) # generates an iterator for the indices
Continuous models can thus be written at the protein level and will work seamlessly with DifferentialEquations or Optim which will treat it like a vector of protein concentrations. Using the iterators, note that we can get each cell population by looping through 2 levels below the top, so
julia
for cell in level_iter(embryo,3)
# Do something with the cells!
end
or the multiple level iter, which is the one generally used in DifferentialEquations.jl functions:
julia
for (cell, dcell) in LevelIter(3,embryo, dembryo)
# If these are similar structures, `cell` and `dcell` are the similar parts
cell_ode(dcell,cell,p,t)
end
LevelIterIdx can give the indices along with iteration:
julia
for (cell, y, z) in LevelIterIdx(embryo, 3)
# cell = embryo[y:z]
end
However, the interesting behavior comes from event handling. Since embryo will be the
"vector" for the differential equation or optimization problem, it will be the value
passed to the event handling. MultiScaleArrays includes behavior for changing the
structure. For example:
julia
tissue3 = construct(Tissue, deepcopy([population, population2]))
add_node!(embryo, tissue3) # Adds a new tissue to the embryo
remove_node!(embryo, 2, 1) # Removes population 1 from tissue 2 of the embryo
Combined with event handling, this allows for dynamic structures to be derived from low level behaviors.
Heterogeneous Nodes via Tuples
Note that tuples can be used as well. This allows for type-stable broadcasting with heterogeneous nodes. This could be useful for mixing types inside of the nodes. For example:
```julia struct PlantSettings{T} x::T end struct OrganParams{T} y::T end
struct Organ{B<:Number,P} <: AbstractMultiScaleArrayLeaf{B} values::Vector{B} name::Symbol params::P end
struct Plant{B,S,N<:Tuple{Vararg{<:Organ{<:Number}}}} <: AbstractMultiScaleArray{B} nodes::N values::Vector{B} end_idxs::Vector{Int} settings::S end
struct Community{B,N<:Tuple{Vararg{<:Plant{<:Number}}}} <: AbstractMultiScaleArray{B} nodes::N values::Vector{B} end_idxs::Vector{Int} end
mutable struct Scenario{B,N<:Tuple{Vararg{<:Community{<:Number}}}} <: AbstractMultiScaleArrayHead{B} nodes::N values::Vector{B} end_idxs::Vector{Int} end
organ1 = Organ([1.1,2.1,3.1], :Shoot, OrganParams(:grows_up)) organ2 = Organ([4.1,5.1,6.1], :Root, OrganParams("grows down")) organ3 = Organ([1.2,2.2,3.2], :Shoot, OrganParams(true)) organ4 = Organ([4.2,5.2,6.2], :Root, OrganParams(1//3)) plant1 = construct(Plant, (deepcopy(organ1), deepcopy(organ2)), Float64[], PlantSettings(1)) plant2 = construct(Plant, (deepcopy(organ3), deepcopy(organ4)), Float64[], PlantSettings(1.0)) community = construct(Community, (deepcopy(plant1), deepcopy(plant2), )) scenario = construct(Scenario, (deepcopy(community),)) ```
(of course at the cost of mutability).
Idea
The idea behind MultiScaleArrays is simple. The *DiffEq solvers (OrdinaryDiffEq.jl,
StochasticDiffEq.jl, DelayDiffEq.jl, etc.) and native optimization packages like
Optim.jl in their efficient in-place form all work with any Julia-defined
AbstractArray which has a linear index. Thus, to define our multiscale model,
we develop a type which has an efficient linear index. One can think of representing
cells with proteins as each being an array with values for each protein. The linear
index of the multiscale model would be indexing through each protein of each cell.
With proper index overloads, one can define a type such that a[i] does just that,
and thus it will work in the differential equation solvers. MultiScaleArrays.jl
takes that further by allowing one to recursively define an arbitrary n-level
hierarchical model which has efficient indexing structures. The result is a type
which models complex behavior, but the standard differential equation solvers will
work directly and efficiently on this type, making it easy to develop novel models
without having to re-develop advanced adaptive/stiff/stochastic/etc. solving
techniques for each new model.
Defining A MultiScaleModel: The Interface
The required interface is as follows. Leaf types must extend AbstractMultiScaleArrayLeaf, the
highest level of the model or the head extends MultiScaleModelHead, and all
intermediate types extend AbstractMultiScaleArray. The leaf has an array values::Vector{B}.
Each type above then contains three fields:
nodes::Vector{T}values::Vector{B}end_idxs::Vector{Int}
Note that the ordering of the fields matters.
B is the BottomType, which has to be the same as the eltype for the array
in the leaf types. T is another AbstractMultiScaleArray. Thus at each level,
anAbstractMultiScaleArray contains some information of its own (values), the
next level down in the heirarchy (nodes), and caching for indices (end_idxs).
You can add and use extra fields as you please, and even make the types immutable.
The MultiScaleModel API
The resulting type acts as an array. A leaf type l acts exactly as an array
with l[i] == l.values[i]. Higher nodes also act as a linear array. If ln is level
n in the heirarchy, then ln.nodes is the vector of level n-1 objects, and ln.values
are its "intrinsic values". There is an indexing scheme on ln, where:
ln[i,j,k]gets thekthn-3object in thejthn-2object in theith leveln-1object. Of course, this recurses for the whole hierarchy.ln[i]provides a linear index through all.nodesand.valuesvalues in every lower level andln.valuesitself.
Thus typeof(ln) <: AbstractVector{B} where B is the eltype of its leaves and
all .values's.
In addition, iterators are provided to make it easy to iterate through levels.
For h being the head node, level_iter(h,n) iterates through all level objects
n levels down from the top, while level_iter_idx(h,n) is an enumeration
(node,y,z) where node are the nth from the head objects, with h[y:z] being
the values it holds in the linear indexing.
Extensions
Note that this only showed the most basic MultiScaleArray. These types can be extended as one pleases. For example, we can change the definition of the cell to have:
julia
struct Cell{B} <: AbstractMultiScaleArrayLeaf{B}
values::Vector{B}
celltype::Symbol
end
Note that the ordering of the fields matters here: the extra fields must come
after the standard fields (so for a leaf it comes after values, for a standard
multiscale array it would come after nodes,values,end_idxs).
Then we'd construct cells with
cell3 = Cell([3.0; 2.0; 5.0], :BCell), and can give it a cell type.
This information is part of the call, so
julia
for (cell, y, z) in level_iter_idx(embryo, 2)
f(t, cell, @view embryo[y:z])
end
can allow one to check the cell.celltype in f an apply a different ODE depending
on the cell type. You can add fields however you want, so you can use them
to name cells and track lineages.
Showing the use of values, you just pass it to the constructor. Let's pass it an array
of 3 values:
julia
tissue = construct(Tissue, deepcopy([population; population2]), [0.0; 0.0; 0.0])
We can selectively apply some function on these values via:
julia
for (tissue, y, z) in level_iter_idx(embryo, 1)
f(t, tissue, @view embryo[y:z])
end
and mutate tis.values in f. For example, we could have
julia
function f(du, tissue::Tissue, p, t)
du .+= randn(3)
end
applies normal random numbers to the three values. We could use this to add to the
model the fact that tissue.values[1:3] are the tissue's position, and f would then be
adding Brownian motion.
Of course, you can keep going and kind of do whatever you want. The power is yours!
Owner
- Name: Unofficial Julia Mirror
- Login: UnofficialJuliaMirror
- Kind: organization
- Website: https://github.com/UnofficialJuliaMirror/MirrorUpdater.jl
- Repositories: 3
- Profile: https://github.com/UnofficialJuliaMirror
Mirror of all registered Julia packages. Updated weekly by @UnofficialJuliaMirrorBot. See also: @UnofficialJuliaMirrorSnapshots.
Citation (CITATION.bib)
@article{DifferentialEquations.jl-2017,
author = {Rackauckas, Christopher and Nie, Qing},
doi = {10.5334/jors.151},
journal = {The Journal of Open Source Software},
keywords = {Applied Mathematics},
note = {Exported from https://app.dimensions.ai on 2019/05/05},
number = {1},
pages = {},
title = {DifferentialEquations.jl – A Performant and Feature-Rich Ecosystem for Solving Differential Equations in Julia},
url = {https://app.dimensions.ai/details/publication/pub.1085583166 and http://openresearchsoftware.metajnl.com/articles/10.5334/jors.151/galley/245/download/},
volume = {5},
year = {2017}
}