mapmos_cpu_only
Science Score: 57.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
✓CITATION.cff file
Found CITATION.cff file -
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
✓DOI references
Found 1 DOI reference(s) in README -
○Academic publication links
-
○Academic email domains
-
○Institutional organization owner
-
○JOSS paper metadata
-
○Scientific vocabulary similarity
Low similarity (16.5%) to scientific vocabulary
Repository
Basic Info
- Host: GitHub
- Owner: MikhailIum
- License: mit
- Language: Python
- Default Branch: master
- Size: 73.2 KB
Statistics
- Stars: 0
- Watchers: 1
- Forks: 0
- Open Issues: 0
- Releases: 0
Metadata Files
README.md
Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation
Our approach identifies moving objects in the current scan (blue points) and the local map (black points) of the environment and maintains a volumetric belief map representing the dynamic environment.
Click here for qualitative results!
[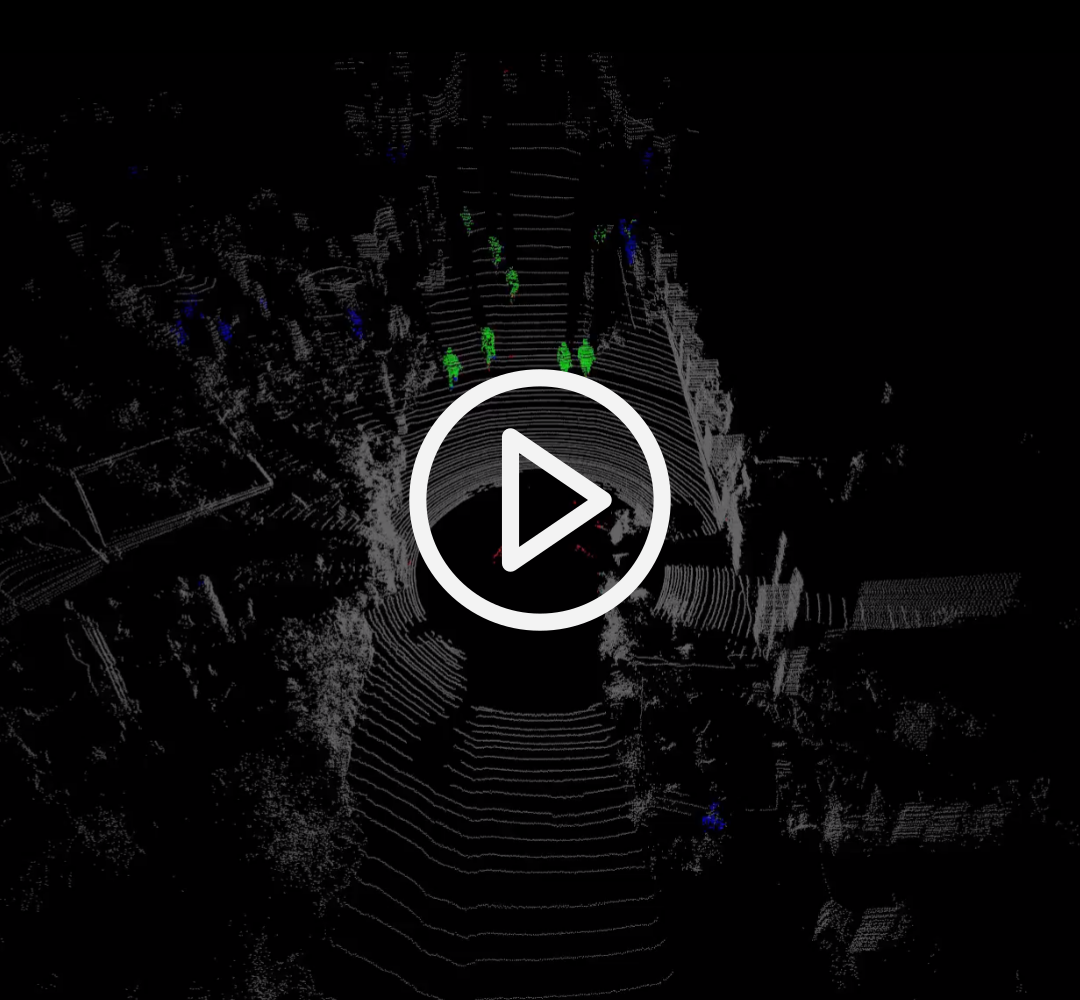](https://github.com/PRBonn/MapMOS/assets/38326482/04c7e5a2-dd44-431a-95b0-c42d5605078a) Our predictions for the KITTI Tracking sequence 19 with true positives (green), false positives (red), and false negatives (blue).Installation
First, make sure the MinkowskiEngine is installed on your system, see here for more details.
Next, clone our repository
bash
git clone git@github.com:PRBonn/MapMOS && cd MapMOS
and install with
bash
make install
or
bash
make install-all
if you want to install the project with all optional dependencies (needed for the visualizer). In case you want to edit the Python code, install in editable mode:
bash
make editable
How to Use It
Just type
bash
mapmos_pipeline --help
to see how to run MapMOS.
This is what you should see
Check the Download section for a pre-trained model. Like KISS-ICP, our pipeline runs on a variety of point cloud data formats like bin, pcd, ply, xyz, rosbags, and more. To visualize these, just type
bash
mapmos_pipeline --visualize /path/to/weights.ckpt /path/to/data
Want to evaluate with ground truth labels?
Because these lables come in all shapes, you need to specify a dataloader. This is currently available for SemanticKITTI and NuScenes as well as our post-processed KITTI Tracking sequence 19 and Apollo sequences (see [Downloads](#downloads)).Want to reproduce the results from the paper?
For reproducing the results of the paper, you need to pass the corresponding config file. They will make sure that the de-skewing option and the maximum range are set properly. To compare different map fusion strategies from our paper, just pass the `--paper` flag to the `mapmos_pipeline`.Training
To train our approach, you need to first cache your data. To see how to do that, just cd into the MapMOS repository and type
bash
python3 scripts/precache.py --help
After this, you can run the training script. Again, --help shows you how:
bash
python3 scripts/train.py --help
Want to verify the cached data?
You can inspect the cached training samples by using the script `python3 scripts/cache_to_ply.py --help`.Want to change the logging directory?
The training log and checkpoints will be saved by default to the current working directory. To change that, export the `export LOGS=/your/path/to/logs` environment variable before running the training script.Downloads
You can download the post-processed and labeled Apollo dataset and KITTI Tracking sequence 19 from our website.
The weights of our pre-trained model can be downloaded as well.
Publication
If you use our code in your academic work, please cite the corresponding paper:
bibtex
@article{mersch2023ral,
author = {B. Mersch and T. Guadagnino and X. Chen and I. Vizzo and J. Behley and C. Stachniss},
title = {{Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation}},
journal = {IEEE Robotics and Automation Letters (RA-L)},
volume = {8},
number = {8},
pages = {5180--5187},
year = {2023},
issn = {2377-3766},
doi = {10.1109/LRA.2023.3292583},
codeurl = {https://github.com/PRBonn/MapMOS},
}
Acknowledgments
This implementation is heavily inspired by KISS-ICP.
License
This project is free software made available under the MIT License. For details see the LICENSE file.
Owner
- Login: MikhailIum
- Kind: user
- Repositories: 3
- Profile: https://github.com/MikhailIum
Citation (CITATION.cff)
cff-version: 1.2.0
preferred-citation:
title: "Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation"
doi: "10.1109/LRA.2023.3292583"
year: "2023"
type: article
journal: "IEEE Robotics and Automation Letters (RA-L)"
url: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/mersch2023ral.pdf
codeurl: https://github.com/PRBonn/MapMOS
authors:
- family-names: Mersch
given-names: Benedikt
- family-names: Guadagnino
given-names: Tiziano
- family-names: Chen
given-names: Xieyuanli
- family-names: Vizzo
given-names: Ignacio
- family-names: Behley
given-names: Jens
- family-names: Stachniss
given-names: Cyrill
GitHub Events
Total
Last Year
Dependencies
- diskcache >=5.3.0
- kiss-icp >=0.3.0
- pytorch_lightning >=1.6.4