Dryft
Dryft: A Python and MATLAB package to correct drifting ground reaction force signals during treadmill running - Published in JOSS (2019)
Science Score: 95.0%
This score indicates how likely this project is to be science-related based on various indicators:
-
○CITATION.cff file
-
✓codemeta.json file
Found codemeta.json file -
✓.zenodo.json file
Found .zenodo.json file -
✓DOI references
Found 4 DOI reference(s) in README and JOSS metadata -
✓Academic publication links
Links to: ncbi.nlm.nih.gov, joss.theoj.org -
✓Committers with academic emails
1 of 3 committers (33.3%) from academic institutions -
○Institutional organization owner
-
✓JOSS paper metadata
Published in Journal of Open Source Software
Scientific Fields
Repository
Correcting drift in ground reaction force data during treadmill running
Basic Info
- Host: GitHub
- Owner: alcantarar
- License: mit
- Language: Python
- Default Branch: master
- Homepage: https://alcantarar.github.io/dryft
- Size: 107 MB
Statistics
- Stars: 13
- Watchers: 3
- Forks: 4
- Open Issues: 2
- Releases: 3
Metadata Files
README.md
dryft
Read the published manuscript in the Journal of Open Source Software:

dryft is an open-source Python package that corrects running ground reaction force (GRF)
signal drift. This package was developed for biomechanical researchers using force plates
or a force-measuring treadmill to collect an individual's GRF during running, but should work for split-belt treadmill
walking as well. Due to the prevalence of MATLAB in the field of Biomechanics, I have also developed a set of
MATLAB functions that operate like the Python package. However, this readme will
focus on the use of the Python package.
Table of Contents
Dependencies
This package was designed to work with and was tested with Python 3.6.7. Other python 3.X versions may be supported, provided dependency compatibilities and requirements are met.
The package requires the following dependencies: * numpy * pandas (0.24.0 or newer) * matplotlib * scipy
Installation
Using virtualenv
On Windows:
git clone https://github.com/alcantarar/dryft.git
pip install virtualenv
python -m venv dryft-env
.\dryft-env\Scripts\activate
cd dryft
python setup.py install
On macOS or Linux:
git clone https://github.com/alcantarar/dryft.git
pip install virtualenv
python -m venv dryft-env
source dryft-env/bin/activate
cd dryft
python setup.py install
Using pip:
git clone https://github.com/alcantarar/dryft.git
cd dryft
pip install -r requirements.txt
Using Anaconda
You can use Anaconda to setup a Python 3.6.7
environment to use this package. If you wish to setup a new environment, an Anaconda environment
file is included to automatically install most dependencies.
You can create/activate an anaconda environment and download dependencies using the Anaconda Prompt:
git clone https://github.com/alcantarar/dryft.git
cd dryft
conda env create -f path\to\environment.yml
conda activate dryft-env
python setup.py install
How dryft Works
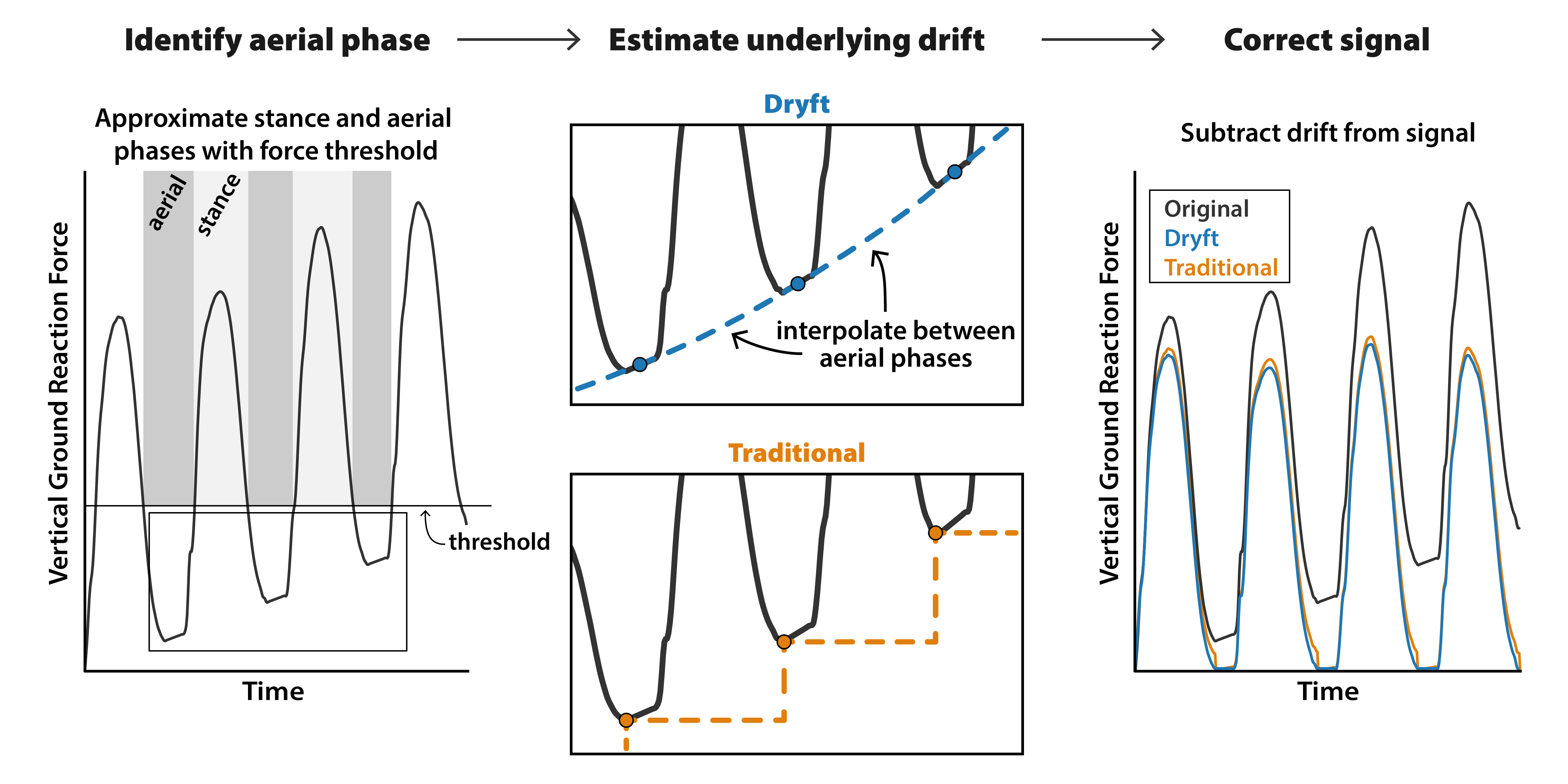
Running is generally characterized by two phases: a stance and aerial phase. Only one foot is on the ground at a time during
stance phase and both feet are off the ground during aerial phase. The force exerted by the body on the ground during
aerial phase is zero and during stance phase it is greater than zero. If drift is present in the force signal, values
during the aerial phase will no longer be zero. First, dryft calculates the force occurring during each aerial phase of
a continuous running trial. Then these aerial phase values are interpolated to the length of the trial using a 3rd order
spline fill. Lastly, the interpolated values, which represents the signal drift over time, are subtracted from the original
trial. This effectively corrects for signal drift.
Another method of correcting drift is described by Paolini et al. (2007),
where the mean force measured during the aerial phase is subtracted from the following stance phase. The success of this
approach is highly dependent upon the method of identifying aerial phases in the vertical ground reaction force signal. If a
force threshold is used to define the boundaries of each aerial phase, parts of the neighboring stance phases may
be included in the calculation of the mean (left panel in the figure above). Additionally, this approach assumes no change in drift over the duration of a
stance phase. The dryft package uses the force measured at the middle of each aerial phase
and spline interpolates between them to correct signal drift. This approach differs from the method described by Paolini
et al. (2007) and currently available drift correction methods which can only account for
linear drift or a constant
offset
Using dryft
Testing
Running the following from the command line will automatically test the installation of dryft:
python -m dryft.sample.test
Tutorial
A notebook of dryft.sample.test is available here as a tutorial.
Documentation
Please refer to the documentation page
Contributing
To report an problem with dryft, please create a new issue.
Contact alcantarar with any support or general questions about dryft. I also welcome
meaningful contributions via pull requests.
Licensing
This package is licensed under the MIT License. Copyright 2019 Ryan Alcantara.
Owner
- Name: Ryan Alcantara
- Login: alcantarar
- Kind: user
- Location: Stanford, CA
- Company: NMBL
- Website: www.ryanalcantara.com
- Twitter: Ryan_Alcantara_
- Repositories: 31
- Profile: https://github.com/alcantarar
Postdoc at Stanford Neuromuscular Biomechanics Lab (NMBL)
JOSS Publication
Dryft: A Python and MATLAB package to correct drifting ground reaction force signals during treadmill running
Authors

Department of Integrative Physiology, University of Colorado Boulder, Boulder CO, USA
Editor
Kevin M. Moerman
Tags
biomechanics signal processing detrend GRF walkingGitHub Events
Total
Last Year
Committers
Last synced: 12 months ago
Top Committers
| Name | Commits | |
|---|---|---|
| alcantarar | r****a@c****u | 336 |
| bobchees3 | 3****3 | 1 |
| agricolab | r****e@g****e | 1 |
Committer Domains (Top 20 + Academic)
Issues and Pull Requests
Last synced: 11 months ago
All Time
- Total issues: 23
- Total pull requests: 22
- Average time to close issues: about 2 months
- Average time to close pull requests: 21 minutes
- Total issue authors: 4
- Total pull request authors: 2
- Average comments per issue: 0.61
- Average comments per pull request: 0.09
- Merged pull requests: 22
- Bot issues: 0
- Bot pull requests: 0
Past Year
- Issues: 0
- Pull requests: 0
- Average time to close issues: N/A
- Average time to close pull requests: N/A
- Issue authors: 0
- Pull request authors: 0
- Average comments per issue: 0
- Average comments per pull request: 0
- Merged pull requests: 0
- Bot issues: 0
- Bot pull requests: 0
Top Authors
Issue Authors
- agricolab (11)
- alcantarar (9)
- moorepants (2)
- mwptrsn (1)
Pull Request Authors
- alcantarar (21)
- agricolab (1)
Top Labels
Issue Labels
Pull Request Labels
Dependencies
- matplotlib
- numpy
- pandas >=0.24.0
- python 3.6.*
- scipy
- matplotlib >=3.1.1
- numpy >=1.17
- pandas >=0.24
- scipy >=1.3.1
- matplotlib *
- numpy *
- pandas >=0.24.0
- scipy *